Глубокий космос 1 — Deep Space 1
| Инструменты | |
|---|---|
| MICAS | Миниатюрный интегрированный фотоаппарат-спектрометр |
| PEPE | Плазменный эксперимент для исследования планет |
| IDS | Подсистема диагностики ионной двигательной установки (IPS) |
| Инструменты | |
|---|---|
| MICAS | Миниатюрный интегрированный фотоаппарат-спектрометр |
| PEPE | Плазменный эксперимент для исследования планет |
| IDS | Подсистема диагностики ионной двигательной установки (IPS) |
Deep Space 1 ( DS1 ) был космическим аппаратом НАСА для демонстрации технологий, который пролетел мимо астероида и кометы . Это было частью программы « Новое тысячелетие» , посвященной тестированию передовых технологий.
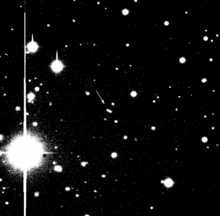
Запущенный 24 октября 1998 года космический корабль Deep Space 1 пролетел мимо астероида 9969 со шрифтом Брайля , который был его основной научной целью. Миссия дважды расширялась, включая встречу с кометой 19P / Borrelly и дальнейшие инженерные испытания. Проблемы на начальных этапах и с его звездным трекером привели к неоднократным изменениям в конфигурации миссии. Хотя пролет над астероидом был лишь частичным, встреча с кометой дала ценную информацию. Три из двенадцати технологий на борту должны были сработать в течение нескольких минут после отделения от ракеты-носителя для продолжения миссии.
Серию Deep Space продолжили зонды Deep Space 2 , которые были запущены в январе 1999 года вместе с Mars Polar Lander и должны были ударить по поверхности Марса (хотя контакт был потерян и миссия провалилась). Deep Space 1 был первым космическим кораблем НАСА, в котором использовалась ионная тяга, а не традиционные ракеты с химическим двигателем.
Целью Deep Space 1 была разработка и проверка технологий для будущих миссий; Было протестировано 12 технологий:
Система Autonav, разработанная Лабораторией реактивного движения НАСА , делает снимки известных ярких астероидов . Астероиды во внутренней Солнечной системе движутся по отношению к другим телам с заметной, предсказуемой скоростью. Таким образом, космический корабль может определять свое относительное положение, отслеживая такие астероиды на звездном фоне, который кажется фиксированным в таких временных масштабах. Два или более астероида позволяют космическому кораблю определить свое положение по триангуляции; две или более позиции во времени позволяют космическому кораблю определять свою траекторию. Существующие космические аппараты отслеживаются по их взаимодействию с передатчиками сети дальнего космоса НАСА (DSN), по сути, обратной GPS . Однако для отслеживания DSN требуется много квалифицированных операторов, а DSN перегружен тем, что используется в качестве сети связи. Использование Autonav снижает стоимость миссии и требования DSN.
Система Autonav также может использоваться в обратном направлении, отслеживая положение тел относительно космического корабля. Это используется для обнаружения целей для научных инструментов. Корабль запрограммирован на грубое местоположение цели. После первоначального захвата Autonav удерживает объект в кадре, даже используя управление ориентацией космического корабля. Следующим космическим кораблем, который использовал Autonav, был Deep Impact .
Основная энергия для миссии была произведена с помощью новой технологии солнечных батарей, Solar Concentrator Array с Refractive Linear Element Technology (SCARLET), в которой используются линейные линзы Френеля из силикона для концентрации солнечного света на солнечных элементах. ABLE Engineering разработала технологию концентратора и построила солнечную батарею для DS1 вместе с Entech Inc, которая поставила оптику Френеля, и исследовательским центром NASA Glenn Research Center . Мероприятие спонсировалось Организацией противоракетной обороны. Технология концентрирующих линз была объединена с солнечными элементами с двойным переходом, которые имели значительно лучшие характеристики, чем солнечные элементы на основе GaAs, которые были современными на момент запуска миссии.
Массивы SCARLET генерировали 2,5 киловатта на 1 АЕ, имея меньший размер и вес, чем обычные массивы.
Хотя ионные двигатели разрабатывались в НАСА с конца 1950-х годов, за исключением миссий SERT в 1960-х, эта технология не была продемонстрирована в полете на космических кораблях Соединенных Штатов, хотя сотни двигателей с эффектом Холла использовались на советских и Русский космический корабль. Это отсутствие опыта работы в космосе означало, что, несмотря на потенциальную экономию массы топлива, технология считалась слишком экспериментальной, чтобы ее можно было использовать для дорогостоящих миссий. Кроме того, непредвиденные побочные эффекты ионной тяги могут каким-то образом помешать типичным научным экспериментам, таким как измерения полей и частиц. Таким образом, основной задачей демонстрации Deep Space 1 было продемонстрировать длительное использование ионного двигателя в научной миссии.
Готовность НАСА Солнечного Применения технологии (NSTAR) электростатический ионный двигатель , разработанная в NASA Glenn, достигает удельный импульс в 1000-3000 секунд. Это на порядок больше, чем у традиционных космических двигателей, что дает экономию массы примерно вдвое. Это приводит к гораздо более дешевым ракетам-носителям. Хотя двигатель развивает тягу всего 92 миллиньютона (0,33 унции ф. ) При максимальной мощности (2100 Вт на DS1), корабль достиг высоких скоростей, потому что ионные двигатели работают непрерывно в течение длительных периодов времени.
Следующим космическим кораблем, который будет использовать двигатели NSTAR, был Dawn с тремя резервными блоками.



Remote Agent (RAX), программное обеспечение для дистанционного интеллектуального самовосстановления, разработанное в Исследовательском центре Эймса НАСА и Лаборатории реактивного движения, было первой системой управления с искусственным интеллектом, которая могла управлять космическим кораблем без участия человека. Remote Agent успешно продемонстрировал способность планировать действия на борту, правильно диагностировать и реагировать на смоделированные неисправности в компонентах космического корабля с помощью встроенной среды REPL. Автономное управление позволит космическим кораблям будущего работать на больших расстояниях от Земли и выполнять более сложные научные исследования в глубоком космосе. Компоненты программного обеспечения Remote Agent использовались для поддержки других миссий НАСА. Основными компонентами Remote Agent были надежный планировщик (EUROPA), система выполнения планов (EXEC) и диагностическая система на основе моделей (Livingstone). ЕВРОПА использовалась в качестве наземного планировщика марсоходов для исследования Марса . EUROPA II использовалась для поддержки посадочного модуля Phoenix Mars и Марсианской научной лаборатории . Ливингстон-2 был запущен в качестве эксперимента на борту Earth Observing-1 и F / A-18 Hornet в Центре летных исследований NASA Dryden .
Еще один метод снижения нагрузки на DSN — это эксперимент Beacon Monitor . Во время длительных крейсерских периодов полета работа космических кораблей практически приостанавливается. Вместо данных корабль излучает несущий сигнал на заданной частоте. Без декодирования данных несущая может быть обнаружена гораздо более простыми наземными антеннами и приемниками. Если космический корабль обнаруживает аномалию, он переключает несущую между четырьмя тонами в зависимости от срочности. Затем наземные приемники сигнализируют операторам об отвлечении ресурсов DSN. Это не позволяет квалифицированным операторам и дорогостоящему оборудованию присматривать за необременительной миссией, выполняемой номинально. Похожая система использовалась на зонде New Horizons Pluto для снижения затрат во время его десятилетнего круиза от Юпитера к Плутону.

Малый Deep Space транспондер (SDST) представляет собой компактная и легкая систему радио-связь. Наряду с использованием миниатюрных компонентов, то SDST способен связывать над K в группу . Поскольку эта полоса частот выше, чем диапазоны, которые в настоящее время используются для миссий в дальний космос, такой же объем данных может быть отправлен меньшим оборудованием в космосе и на земле. И наоборот, существующие антенны DSN могут разделить время между большим количеством миссий. На момент запуска в DSN было установлено небольшое количество приемников K a на экспериментальной основе; K a операций и миссий увеличивается.
SDST позже использовался в других космических миссиях, таких как Марсианская научная лаборатория (марсоход Curiosity ).
Достигнув цели, DS1 определяет среду частиц с помощью прибора PEPE (Plasma Experiment for Planetary Exploration). Этот прибор измерял поток ионов и электронов в зависимости от их энергии и направления. Состав ионов определяли с помощью времяпролетного масс-спектрометра .
Прибор MICAS (миниатюрная интегрированная камера и спектрометр ) объединил визуализацию в видимом свете с инфракрасной и ультрафиолетовой спектроскопией для определения химического состава. На все каналы используется телескоп 10 см (3,9 дюйма), в котором используется зеркало из карбида кремния .
И PEPE, и MICAS были похожи по возможностям на более крупные инструменты или наборы инструментов на других космических кораблях. Они были меньше по размеру и потребляли меньше энергии, чем те, что использовались в предыдущих миссиях.


Перед запуском Deep Space 1 должен был посетить комету 76P / West – Kohoutek – Ikemura и астероид 3352 McAuliffe . Из-за задержки запуска цели были изменены на астероид 9969 Брайля (в то время называемый 1992 KD) и комету 107P / Уилсона-Харрингтона . Он достиг нарушенного пролета шрифта Брайля и из-за проблем со звездным трекером был перенаправлен на полет кометы 19P / Borrelly , что оказалось успешным. Облет астероида 1999 KK 1 в августе 2002 года рассматривался как еще одна расширенная миссия, но в конечном итоге не был продвинут из-за соображений стоимости. Во время миссии также были получены высококачественные инфракрасные спектры Марса .
Первоначально ионный силовой двигатель вышел из строя через 4,5 минуты работы. Однако позже он был восстановлен и отлично работал. В начале миссии материал, выброшенный во время отделения ракеты-носителя, вызвал короткое замыкание близко расположенных решеток вывода ионов. В конечном итоге загрязнение было устранено, так как материал был разрушен электрической дугой, сублимирован за счет выделения газа или просто позволил уйти наружу. Это было достигнуто путем многократного перезапуска двигателя в режиме ремонта двигателя с образованием дуги на захваченном материале.
Считалось, что выхлоп ионного двигателя может мешать работе других систем космического корабля, таких как радиосвязь или научные инструменты. Детекторы PEPE имели второстепенную функцию для отслеживания таких эффектов от двигателя. Никаких помех обнаружено не было, хотя поток ионов от двигателя не позволял PEPE наблюдать ионы ниже примерно 20 эВ.
Еще одной неудачей стала потеря звездного трекера . Звездный трекер определяет ориентацию космического корабля, сравнивая звездное поле с его внутренними картами. Миссия была сохранена, когда камера MICAS была перепрограммирована, чтобы заменить звездный трекер. Хотя MICAS более чувствителен, его поле зрения на порядок меньше, что создает большую нагрузку на обработку информации. По иронии судьбы, звездный трекер был стандартным компонентом, который должен был быть очень надежным.
Без работающего звездного трекера продвижение ионов было временно приостановлено. Потеря времени тяги вызвала отмену пролета мимо кометы 107P / Уилсона – Харрингтона .
Система Autonav время от времени требовала корректировок вручную. Большинство проблем заключались в идентификации объектов, которые были слишком тусклыми или которые было трудно идентифицировать из-за того, что более яркие объекты вызывали дифракционные всплески и отражения в камере, из-за чего Autonav неправильно определял цели.
Система удаленного агента была представлена с тремя смоделированными отказами на космическом корабле и правильно обработала каждое событие.
В целом это стало успешной демонстрацией полностью автономного планирования, диагностики и восстановления.
Инструмент MICAS оказался удачным по конструкции, но ультрафиолетовый канал вышел из строя из-за неисправности электрической части. Позже в миссии, после отказа звездного трекера, MICAS также взял на себя эту обязанность. Это вызвало постоянные перерывы в его использовании в научных целях во время оставшейся миссии, включая встречу с кометой Боррелли.
Источник