Роботы, изучающие космос (26 фото)
12 апреля весь мир отметил День авиации и космонавтики — памятную дату, посвященную первому полету человека в космос. Это особенный день — день триумфа науки и всех тех, кто сегодня трудится в космической отрасли. Однако не стоит забывать, что технический прогресс проникает во все отрасли нашей деятельности, в том числе и в космос. Представляем вам некоторых роботов, которым мы обязаны многими открытиями, связанными с космосом.
Полет, длившийся всего 108 минут, стал мощным прорывом в освоении космоса. Имя Юрия Гагарина стало широко известно в мире, а сам первый космонавт досрочно получил звание майора и звание Героя Советского Союза.
Вступив в 21 век, мы видим поразительные успехи космической техники — вокруг Земли обращаются десятки тысяч спутников, космические аппараты совершили посадку на Луну, привезя оттуда образцы грунта. Впоследствии на Марс и Венеру опускались автоматические зонды, несколько космических аппаратов покинули пределы Солнечной Системы и несут на себе послания Внеземным Цивилизациям. И это только начало.
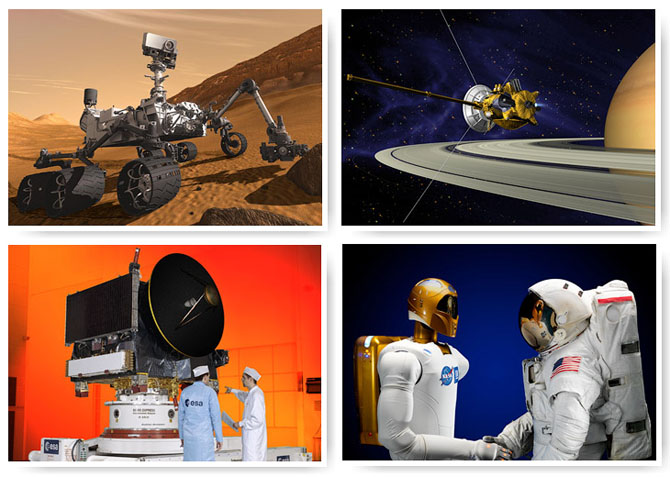
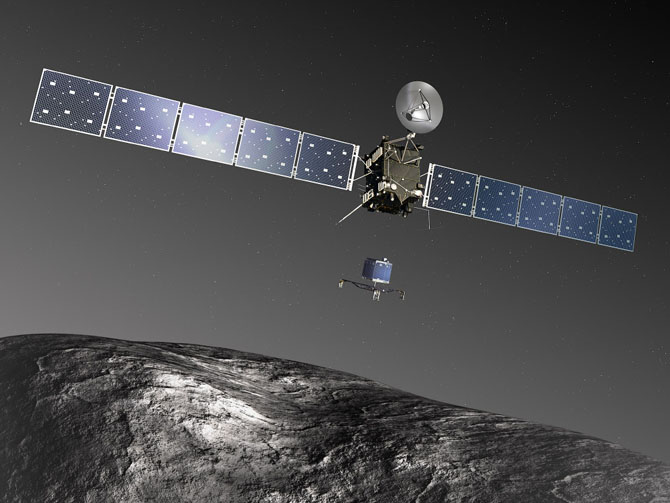
Розетта — космический аппарат, предназначенный для исследования кометы. Разработан и изготовлен Европейским космическим агентством в сотрудничестве с NASA. Космический аппарат запущен 2 марта 2004 года к комете 67P/Чурюмова — Герасименко. Состоит из двух частей: собственно зонда «Розетта» и спускаемого аппарата «Филы».
Название зонда происходит от знаменитого Розеттского камня — каменной плиты с выбитыми на ней тремя идентичными по смыслу текстами, два из которых написаны на древнеегипетском языке (один — иероглифами, другой — демотическим письмом), а третий написан на древнегреческом языке. Сравнивая тексты Розеттского камня, учёные смогли расшифровать древнеегипетские иероглифы; с помощью космического аппарата «Розетта» ученые надеются узнать, как выглядела Солнечная система до того, как сформировались планеты.
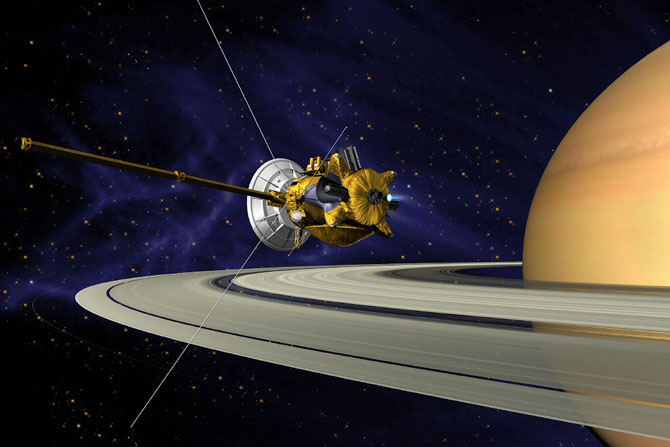
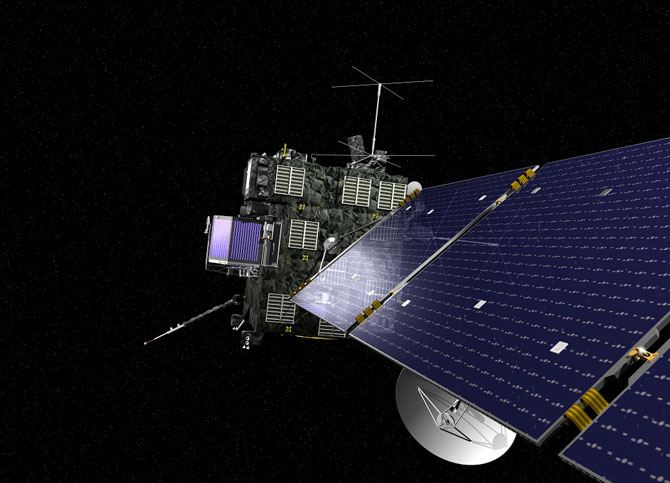
Кассини-Гюйгенс — автоматический космический аппарат, созданный совместно НАСА, Европейским космическим агентством и Итальянским космическим агентством. Кассини-Гюйгенс предназначен для исследования планеты Сатурн, колец и спутников. Аппарат состоит из орбитальной станции — искусственного спутника Сатурна Кассини и спускаемого аппарата с автоматической станцией Гюйгенс, предназначенной для посадки на Титан.
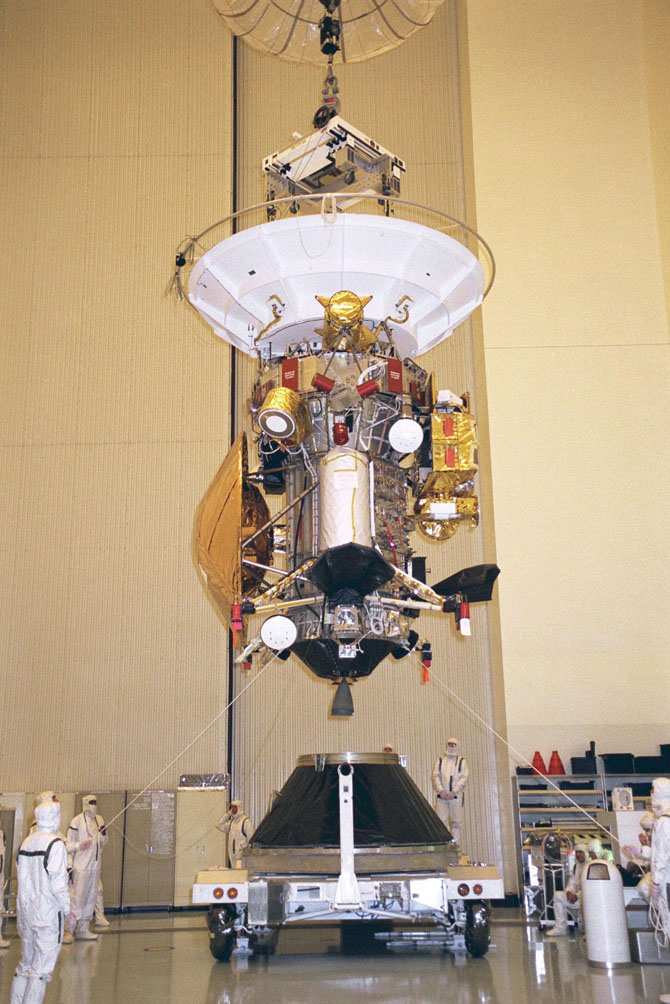
Кассини-Гюйгенс был запущен 15 октября 1997 года. 1 июля 2004 года после торможения вышел на орбиту спутника Сатурна. Общие затраты на миссию превышают 3.26 млрд долларов США.

Мангальян
Мангальян — индийская автоматическая межпланетная станция, предназначенная для исследования Марса с орбиты искусственного спутника. Для Индии это первый запуск космического аппарата к Марсу и первый запуск космического аппарата к другой планете. Основная цель первой индийской миссии к Марсу — разработка технологий, необходимых для успешного осуществления следующих этапов полёта космического аппарата к Марсу. Научные цели — исследование поверхности (детали поверхности — кратеры, горы, долины и т. д., морфология, минералогия) и атмосферы Марса индийскими научными приборами.
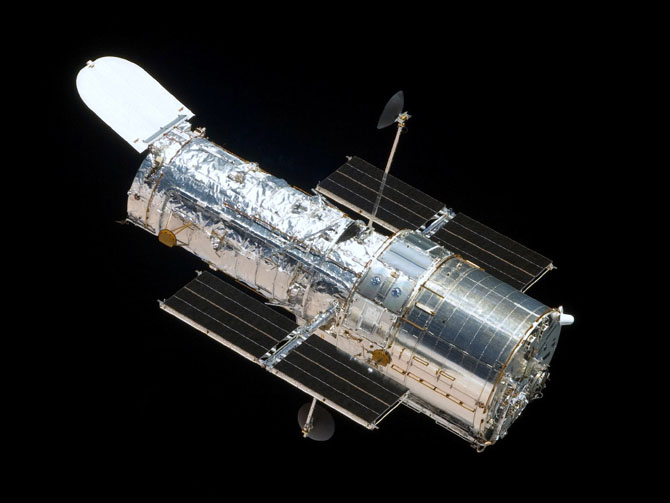
Космический телескоп «Хаббл»
Это автоматическая обсерватория на орбите вокруг Земли, названная в честь Эдвина Хаббла. Телескоп «Хаббл» — совместный проект НАСА и Европейского космического агентства. Размещение телескопа в космосе даёт возможность регистрировать электромагнитное излучение в диапазонах, в которых земная атмосфера непрозрачна; в первую очередь — в инфракрасном диапазоне. Благодаря отсутствию влияния атмосферы разрешающая способность телескопа в 7—10 раз больше, чем у аналогичного телескопа, расположенного на Земле.

Первое упоминание концепции орбитального телескопа встречается в книге Германа Оберта «Ракета в межпланетном пространстве», изданной в 1923 году. В 1946 году американский астрофизик Лайман Спитцер опубликовал статью «Астрономические преимущества внеземной обсерватории».
За 15 лет работы на околоземной орбите «Хаббл» получил 1 млн изображений 22 тыс. небесных объектов — звёзд, туманностей, галактик, планет. Поток данных, которые он ежемесячно генерирует в процессе наблюдений, составляет около 480 ГБ. Общий их объём, накопленный за всё время работы телескопа, составляет примерно 50 терабайт. Более 3900 астрономов получили возможность использовать его для наблюдений, опубликовано около 4000 статей в научных журналах.
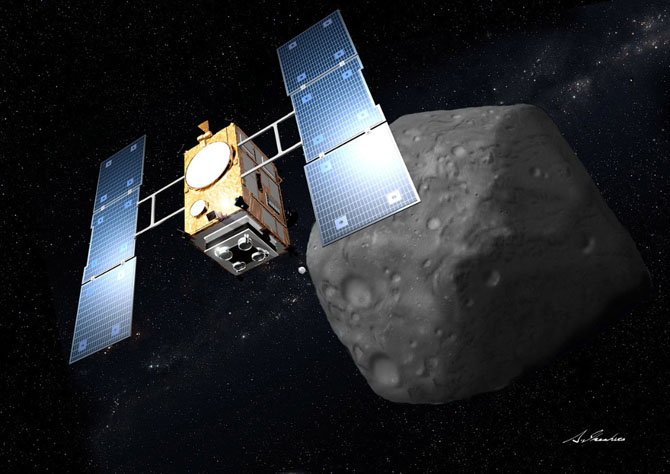
«Хаябуса-2» — автоматическая межпланетная станция Японского агентства аэрокосмических исследований (JAXA), предназначенная для доставки образцов грунта с астероида класса C.
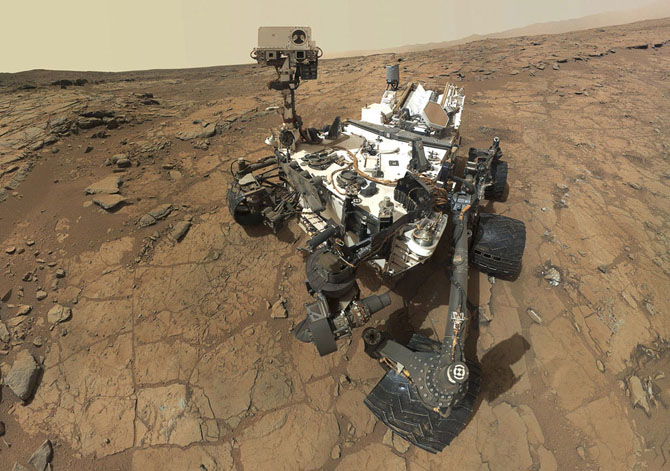
Марсоход третьего поколения представляет собой автономную химическую лабораторию в несколько раз больше. Запуск «Кьюриосити» к Марсу состоялся 26 ноября 2011 года, мягкая посадка на поверхность Марса — 6 августа 2012 года. Предполагаемый срок службы на Марсе — один марсианский год (686 земных суток).

Название «Кьюриосити» было выбрано в 2009 году среди вариантов, предложенных школьниками, путём голосования в сети Интернет. Среди других вариантов были Adventure («Приключение»),Amelia, Journey («Путешествие»), Perception («Восприятие»), Pursuit («Стремление»), Sunrise («Восход»), Vision («Видение»), Wonder («Чудо»).
400 человек обеспечивает работу Кьюриосити с Земли — 250 учёных и примерно 160 инженеров. «Кьюриосити» запрограммирован каждый год петь себе песню Happy Birthday.
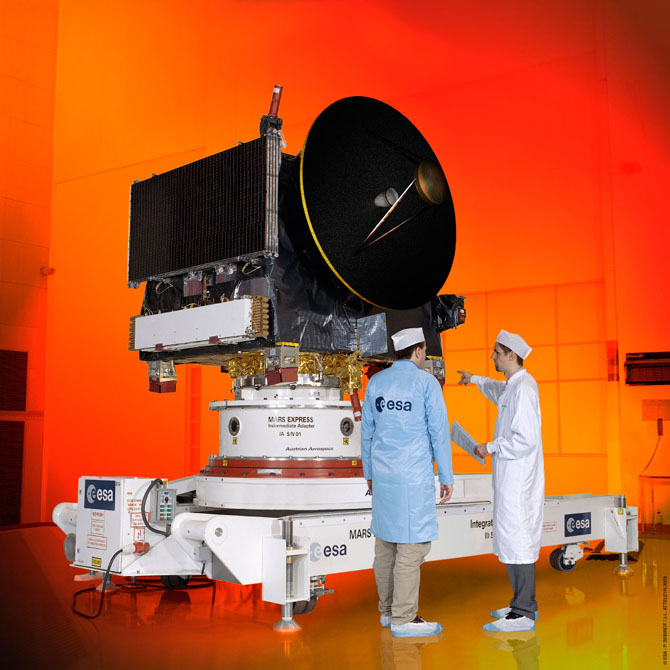
«Марс-экспресс» — автоматическая межпланетная станция Европейского космического агентства, предназначенная для изучения Марса. Космический аппарат состоял из орбитальной станции — искусственного спутника Марса и спускаемого аппарата с автоматической марсианской станцией «Бигль-2».

2 июня 2003 «Марс-экспресс» стартовал на космодроме «Байконур» с помощью ракеты-носителя «Союз-ФГ» с разгонным блоком «Фрегат». Благодаря снимкам косморобота учёные смогли сконструировать и представить трёхмерные модели марсианских ландшафтов.
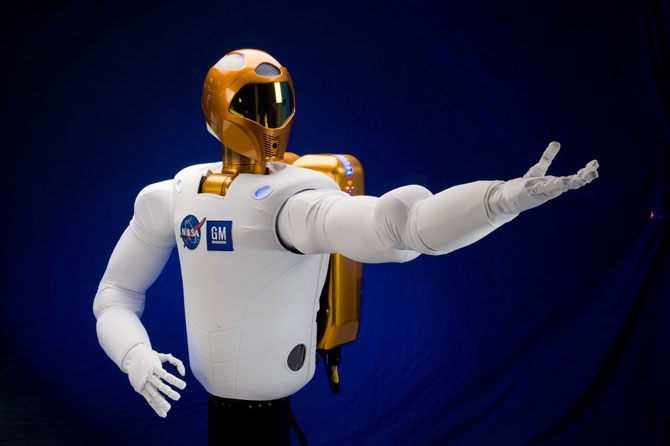
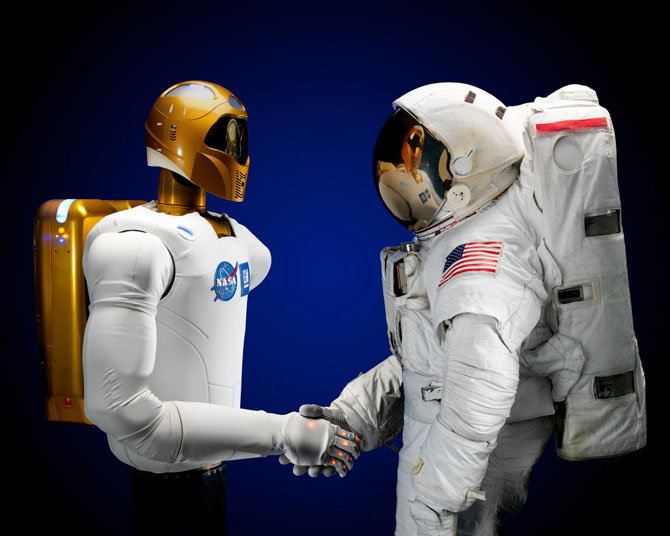
Робонавт-2 — робот, живущий на МКС. Он представляет собой безногую (до 2014 года) человекоподобную фигуру, голова которой выкрашена золотой краской, а торс — белой. На руках у робонавта по пять пальцев с суставами наподобие человеческих. Машина умеет писать, захватывать и складывать предметы, держать тяжёлые вещи, например, гантель весом 9 кг. Робот пока не имеет нижней половины тела.
В шлем R2 вмонтированы четыре видеокамеры, благодаря им робот не только ориентируется в пространстве, но и транслирует с них сигналы на мониторы диспетчеров. Также в шлеме находится и инфракрасная камера. Общее число датчиков и сенсоров — более 350. Дальнейшее развитие проекта «Робонавт» предусматривает высадку робота на поверхность Луны. С помощью него учёные будут удалённо «ходить» по поверхности, изучать лунный грунт, настраивать оборудования.
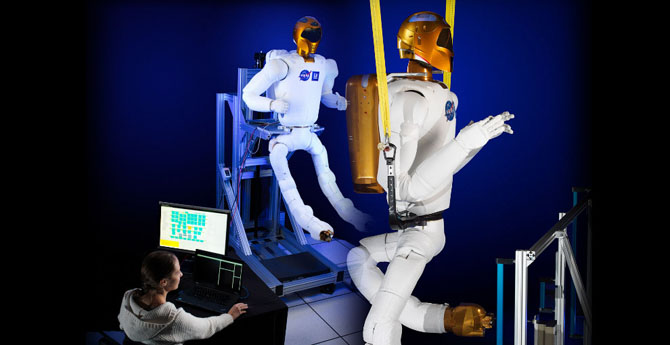
После того, как к роботу-гумоноиду подсоединили ноги в 2014 году, его общий рост составил 2.7 метров. Каждая нога робота имеет семь соединений.
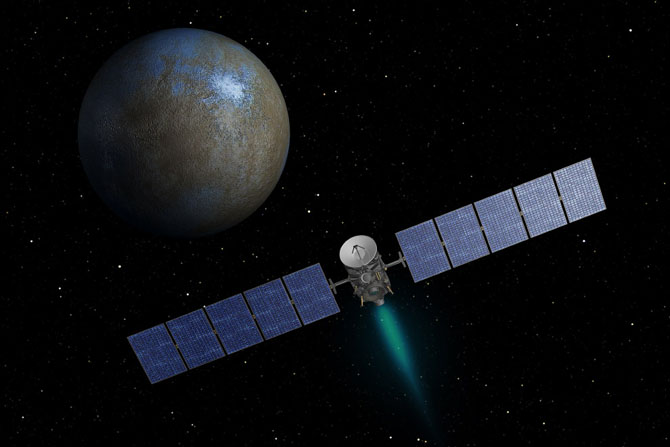
Автоматическая межпланетная станция Dawn (рус. Рассвет) была запущена НАСА 27 сентября 2007 года для исследования астероида Весты и карликовой планеты Цереры. К Церере аппарат «Dawn» приблизился 6 марта 2015 года. «Он должен проработать на орбите Цереры до июля 2015 года.
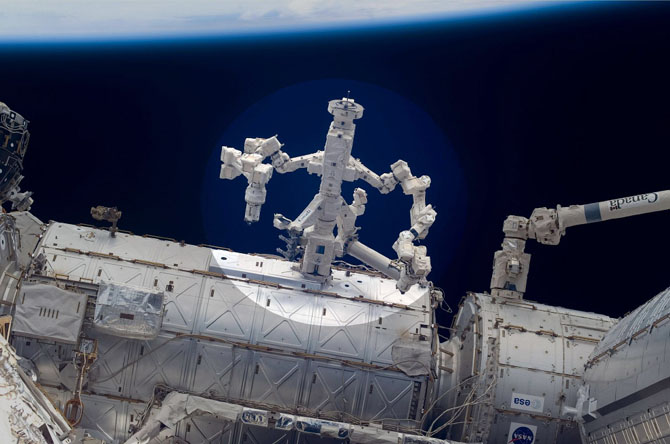
Это второй робот на МКС. Декстр (также известный как «гибкий манипулятор специального назначения») — двурукий манипулятор, являющийся частью мобильной обслуживающей системы Канадарм2 на МКС. Его целью является расширение функциональности этой системы, позволяющей выполнять действия за бортом станции без необходимости выхода в открытый в космос.
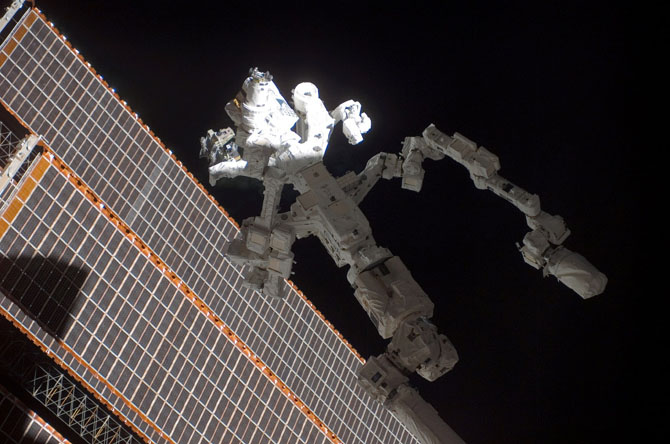
Декстр является вкладом Канады в проект МКС. Название «Декстр» происходит не от имени главного героя одноименного сериала, а от английского слова dexterity — гибкость, ловкость, проворство. Также его часто называют «Canada hand» («Канадская рука»).

Это второй марсоход космического агентства НАСА (Curiosity — третий). Был выведен с помощью ракеты-носителя Дельта-2 7 июля 2003 года. На поверхность Марса опустился 25 января 2004 года тремя неделями позже первого марсохода Спирит. Основной задачей миссии было изучение осадочных пород, которые, как предполагалось, должны были образоваться в кратерах (Гусева, Эребус), где когда-то могло находиться озеро, море или целый океан.
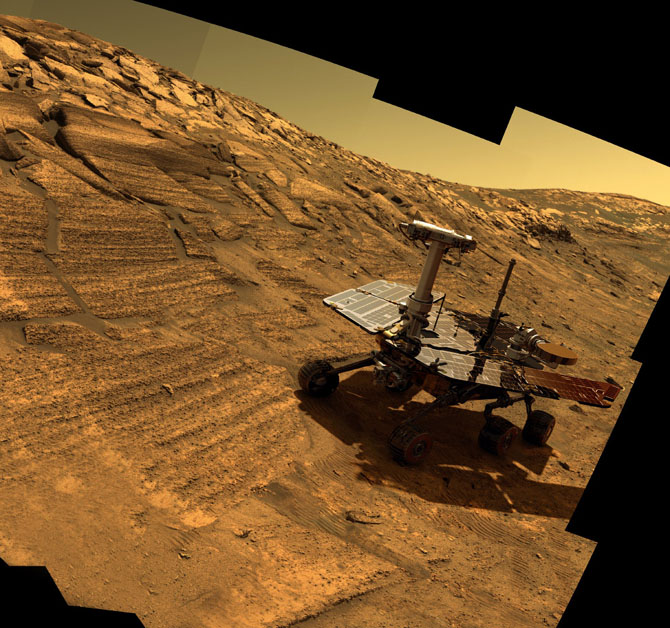
В конце апреля 2010 года продолжительность миссии достигла 2246 сол, что сделало её самой длительной среди аппаратов, работавших на поверхности «красной планеты». На сегодняшний день Оппортьюнити продолжает эффективно функционировать, уже более чем в 40 раз превысив запланированный срок в 90 сол. За неоценимый вклад Оппортьюнити в изучение Марса, в его честь был назван астероид 39382.
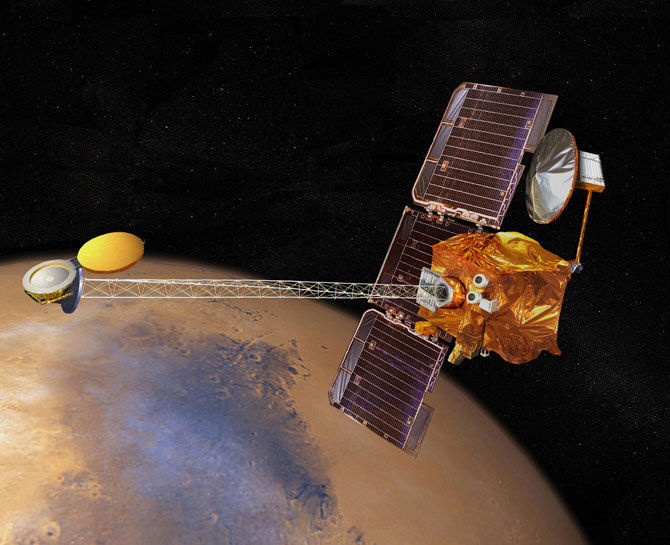
Это действующий орбитальный аппарат НАСА, исследующий Марс. Главная задача, стоящая перед аппаратом, заключается в изучении геологического строения планеты и поиске минералов. Аппарат был запущен 7 апреля 2001 года.

Автоматическая межпланетная станция НАСА Юнона была запущенна 5 августа 2011 года для исследования Юпитера. Целью миссии является выход аппарата на полярную орбиту искусственного спутника газового гиганта в 2016 году, изучение магнитного поля планеты, а также проверка гипотезы о наличии у Юпитера твёрдого ядра. Кроме того, аппарат должен заняться исследованием атмосферы планеты — определением содержания в ней воды и аммиака, а также построением карты ветров.
Находясь на орбите Юпитера, «Юнона» будет получать всего 4 % от того солнечного света, который аппарат мог бы получать на Земле, однако улучшения в технологии изготовления и эффективности панелей в течение последних десятилетий смогли позволить использовать солнечные панели приемлемых размеров на расстоянии в 5 а.е. от Солнца.

«Вояджер-1» — самый дальний от Земли и самый быстрый движущийся объект, созданный человеком. На 25 марта 2015 года «Вояджер-1» находился на расстоянии в 130,888 а. е. (19 580 млрд км, или 0.002056 св. года) от Солнца — расстояние, преодолеваемое лучом света за 18 часов и 8 минут.
«Вояджер-1» — автоматический зонд, исследующий Солнечную систему и её окрестности с 5 сентября 1977 года. В настоящее время находится в рабочем состоянии и выполняет дополнительную миссию по определению местонахождения границ Солнечной системы, включая пояс Койпера. Первоначальная миссия заключалась в исследовании Юпитера и Сатурна. «Вояджер-1» был первым зондом, который сделал детальные снимки спутников этих планет. На борту аппарата закреплена золотая пластина, где для предполагаемых инопланетян указано местонахождение Земли, а также записаны ряд изображений и звуков. В первой половине 2012 года аппарат вышел на границу межзвёздного пространства.
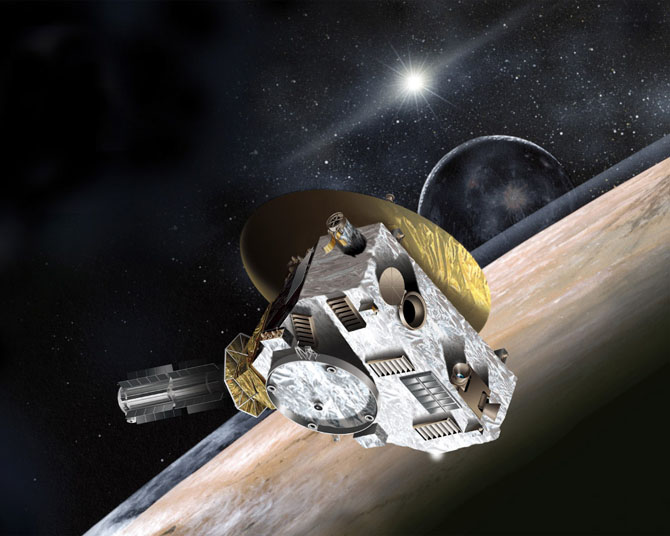
New Horizons — автоматическая межпланетная станция НАСА, предназначенная для изучения Плутона и его естественного спутника Харона. Запуск осуществлён 19 января 2006 года, с пролётом Юпитера в 2007 году (и ускорения в поле его тяготения) и Плутона в 2015 году. После пролёта мимо Плутона аппарат, возможно, изучит один из объектов пояса Койпера. Полная миссия «Новых горизонтов» рассчитана на 15—17 лет.

«Новые горизонты» покинул окрестности Земли с самой большой из всех космических аппаратов скоростью. В момент выключения двигателей она составила 16.26 км/с (относительно Земли). Полет от Земли до Луны занял у зонда 8 часов 35 минут и проходил со скоростью 58 тыс. км/ч, что является рекордной скоростью для аппарата, запущенного по направлению к Луне. Однако, следует учитывать, что скорость аппарата (в отличие от миссий, ориентированных на спутник Земли) не снижалась для выхода на окололунную орбиту.
Advanced Composition Explorer
Робот для самых жарких точек. Это аппарат, запущенный NASA в рамках программы исследования Солнца и космического пространства «Эксплорер» для изучения таких видов материи, как энергетические частицы солнечного ветра, межпланетная и межзвёздная среда, а также галактическая материя.
Источник
Роботы для освоения космоса
Содержание
Введение [ править ]
Вопрос замены человека роботами начал рассматриваться учеными и фантастами еще в начале ХХ века. Человек все больше и больше осваивал окружающее пространство, расширял сферу своей деятельности. Все чаще человек направлял свою работу в те среды, где для его здоровья и жизни условия окружающего пространства представляли опасность. Поэтому задача создания роботов для работы в опасных для человека условиях стал жизненной необходимостью. Сначала человек заменил роботами выполнение трудоёмких операций, таких как автоматизированная линия сборки автомобилей.
Чем дальше шёл технический прогресс, тем в больших областях хозяйственной деятельности человека находили применение роботы и робототехнические системы.
В настоящее время роботы стали неотъемлемой частью производства, высвобождая человека в его трудовой деятельности. Космос является одной из областей применения автоматизированных и робототехнических систем в связи с высокой опасностью для человека открытого космоса.
Что такое косморобот? [ править ]
Космороботы – это роботы, приспособленные работать в космическом пространстве. Преимущество космических роботов перед человеком заключается в том, что они могут работать в крайне неблагоприятных условиях (например, в космосе есть радиация, поэтому человек не может выйти в открытый космос без скафандра, чего нельзя сказать про робота) и обходиться без каких-либо ресурсов (например, топлива), так как в большинстве случаев они работают на солнечных батареях. Также гораздо легче будет пережить потерю такого робота, чем гибель астронавта. Обычно, задача косморобота заключается в проведении какой-нибудь научной работы (например, собрать образцы грунта, просканировать их и отправить собранные данные учёным на Землю). Вообще-то, тоже самое может сделать и обычный робот, работающий на земной поверхности, но к космороботу есть несколько основных требований, которым он должен соответствовать.
- перенести запуск
- функционировать в сложных условиях враждебной среды
- весить как можно меньше
- потреблять мало энергии и иметь долгий срок службы
- работать в автоматическом режиме
- обладать чрезвычайной надежностью
Для того, чтобы соответствовать всем этим требованиям, учёные создают все новые и новые устройства, механизмы, приводы, микроконтроллеры, обладающие высокой прочностью и использующим как можно меньше энергии. Эксперты подсчитали, что отправление на Марс человека будет стоить примерно 200-300 миллиардов долларов, при том что это будет безвозвратное отправление. Еще придется потратить несколько месяцев на психологическую адаптацию участников экспедиции. А отправка корабля, на борту которого будет робот, обойдется примерно в 5-10 миллиардов долларов. Так что роботы в космосе обходятся намного дешевле, чем люди.
Самые известные роботы, которых используют в космических исследованиях — это роверы. Они функционируют в автоматическом режиме и приспособлены для передвижения по поверхности другой планеты. Обычно они комплектуются научно-исследовательским оборудованием, камерой, передатчиком (для связи с Землей) и солнечными батареями, для долгой и автономной работы. Далее я приведу пример космороботов, которые когда-то работали в космосе, работают сейчас, или которых планируют запустить в будущем. И начну я с Лунохода.
Примеры [ править ]
Луноходы [ править ]
Луноход-1 [ править ]
Луноход-1 – первый в мире дистанционно-управляемый самоходный аппарат, успешно работавший на Луне. Отправлен он туда был для изучения лунного грунта, а также для изучения радиоактивного и рентгеновского излучения. На поверхность луны он был доставлен 17 ноября 1970 года советской межпланетной станцией «Луна-17».
- Масса – 756 килограмм
- Длина – 4,42 метра
- Ширина – 2,15 метров
- Высота – 1,92 метра
- Диаметр колес – 510 миллиметров
- Ширина колес – 200 миллиметров
- Колесная база – 1700 миллиметров
- Ширина колеи – 1600 миллиметров
- Две телекамеры (одна резервная), четыре панорамных телефотометра,
- Рентгеновский флуоресцентный спектрометр
- Рентгеновский телескоп
- Одометр-пенетрометр
- Детектор радиации
- Лазерный рефлектор
- Антенна для передачи информации на Землю
У каждого из его восьми колес был свой электродвигатель и свой тормоз, благодаря чему этот робот мог ездить не только вперед-назад, но и объезжать глубокие кратеры и небольшие скалы. В качестве приводов использовали электродвигатели в силу одной причины – другого «горючего» на Луне нет. Электричество косморобот брал из солнечной батареи, установленной у него на крышке приборного отсека. Мощность батареи была равна 180 ватт. Также в систему энергопитания лунохода входили химические буферные батареи. Вместо глаз у Лунохода-1 были телекамеры. В них было применено малокадровое телевидение с частотой смены картинки от 1 кадра в 4 секунды до 1 кадра в 20 секунд.
Луноход-1 проработал в 3 раза дольше запланированного срока, успев проехать 10540 метров, передав на Землю 211 панорам и около 25000 фотографий. Проработав чуть больше 301-го дня, он не вышел на связь с Землей в связи с выработкой изотопного источника теплоты, поддерживающего тепло внутри лунохода.
Луноход-2 [ править ]
Луноход-2 — второй в мире дистанционно-управляемый самоходный аппарат. Он был разработан для фотосъёмки и видеосъёмки Луны, проведения экспериментов с наземным лазерным дальномером и прочих операций. На поверхность луны был доставлен станцией «Луна-21» 15 января 1973 года. Технические характеристики были примерно такие же, как и лунохода-1. Но главным отличием Лунохода-2 от Лунохода-1 являлось наличие третьей телекамеры, установленной на уровне человеческих глаз, что позволяло смотреть намного дальше. Также у него увеличилась масса по сравнению со своим младшим собратом, и составила 836 килограмм. При посадке у него была повреждена система навигации, из-за чего экипажу лунохода пришлось ориентироваться по Солнцу и по звездам. Проработал он почти 5 месяцев, за которые он успел преодолеть 37 километров, передал на Землю 86 панорам и около 80 000 кадров телесъёмки, после чего вышел из строя из-за перегрева аппаратуры внутри корпуса.
Марсоходы [ править ]
Марсоход – это аппарат, предназначенный для изучения планеты Марс.
«Спирит» и «Оппортьюнити» [ править ]
Марсоходы «Спирит» и «Оппортьюнити» — аппараты близнецы, успешно запущенные на Марс в 2004 году. Отправлены они были туда , впринципе, для одной цели – установить, была ли когда-нибудь на Марсе вода или нет.
- Масса – 185 килограмм
- Длина – 1,6 метров
- Ширина – 2,3 метра
- Высота – 1,5 метра
- Максимальная скорость 50 миллиметров в секунду
- Рабочая температура – от -40оС до +40оС
- Бур
- Две телекамеры
- Микроскоп
- Два спектрометра
- Манипулятор
- Навигационная система
- Панорамная камера
- Миниатюрный спектрометр теплового излучения
- Спектрометр альфа-излучения
- Антенна для передачи данных на Землю
На марсоходах этого типа установлено 6 колес, каждое из которых имеет свой собственный электродвигатель. Для разворота марсоход поворачивает передние и задние колёса на нужный угол, разворачиваясь при этом практически «на месте». Телекамеры отдалены друг от друга примерно на расстояние глаз человека. Они фотографируют в разрешении 1024х1024 пикселя. С помощью научного оборудования он берет образцы грунта, анализирует их и отправляет данные учёным. Также в них были установлены электронагреватели, которые поддерживали температуру, необходимую для работы робота. Дополнительно в них установлены радиоизотопные нагреватели, для работы при очень низких температурах.
Всей этой аппаратурой управлял бортовой компьютер, тактовая частота которого равна 20 мегагерц. Питалась вся электроника от солнечной батареи, установленной у него не верху. Вырабатывала она примерно 140 Ватт в 4 часа. Также она заряжала литиево-ионный аккумулятор, энергия с которого использовалась в ночное время. Изначально рассчитывали, что эти марсоходы проработают около 90 дней, и их миссия завершится, но проработали они гораздо больше. Спирит проработал больше шести лет, после чего связь с ним была утеряна. Оппортьюнити до сих пор стабильно работает, и в данный момент проводит изучение кратера Индевор.
Curiosity [ править ]
Curiosity – Марсоход нового поколения, по размерам который в несколько раз больше и тяжелея аппаратов-близнецов «Спирит» и «Оппортьюнити». Его запуск планируется провести в четвертом квартале 2011 года. Его основной целью, как в принципе и целью предыдущих марсоходов, будет являться установить, была ли когда-нибудь жизнь на Марсе или нет, а также провести подготовку к высадке человека на Марс.
- Масса – 900 килограмм
- Длина – 3 метра
- Ширина – 2,7 метра
- Высота – 2,1 метра
- Максимальная скорость – 90 метров в час
- Диаметр колёс – 0,5 метра
- Нейтронный детектор
- Инфракрасный лазер
- «Рука», длиной примерно 1,8 метра, схожая по строению с рукой человека. На руке также установлены небольшой бур и лопатка, с помощью которой робот сможет собирать образцы во внутрь себя, после чего более подробно их исследовать.
- Несколько телекамер
- Навигационная система
- Спектрометр альфа-излучения
- Антенна для передачи данных на Землю
- Рентгенофлуоресцентный анализатор
- Рентгеноструктурный анализатор
- Детектор радиационной оценки
В данной модели аппарата планируют использовать уже зарекомендовавшую себя с хорошей стороны систему передвижения, состоящей из шести колёс, каждое из которых работает от своего собственного электродвигателя, а передние и задние колёса будут ещё и вращаться вокруг собственной оси, что позволит роботу разворачиваться «на одном месте».
Телекамеры будут установлены практически на высоте глаз человека. Разрешение этих камер составит 1600х1200 пикселей «Мозгом» всей этой аппаратуры будет процессор с тактовой частотой 200 мегагерц. Этого вполне хватит для такого робота. Питаться робот будет не от солнечной батареи, как в более ранних моделях, а от радиоизотопного термоэлектрического генератора, способного сгенерировать энергию 2,5 киловатт-часов в день. РИТЭГ будет способен обеспечить марсоход Curiosity энергией на 14 лет.
Роботы-аватары [ править ]
Роботы-аватары – это роботы, полностью копирующие людей, и способные в точности повторять движения человека, находящемся в специальном костюме. Смысл в том, что человек, например какой-нибудь ученый, надевает специальный костюм, после чего робот начинает повторять все движения головы, ног, рук и даже пальцев. Нужно это по нескольким причинам:
- Во-первых – это гораздо упрощенная конструкция кораблей, которые будут посылать аватара в космос, так как не надо встраивать в корабль систему жизнеобеспечения, роботу этого не нужно.
- Во-вторых – робота не нужно забирать обратно с луны, чего нельзя сказать про космонавта. То есть корабль рассчитывается только на полёт в один конец.
- В-третьих – робот может работать в более жестких условиях, чем человек.
- В-четвертых – костюм, управляющий роботом, может надеть любой человек, например, с начала его может надеть ученый, исследуя то, что ему нужно, потом его может надеть инженер, для того чтобы что-либо починить (например, деталь в самом роботе, вышедшую из строя) и так далее…
Но у робота есть один неоспоримый минус – задержка в сигнале, посылаемом от костюма к роботу, и от видеокамеры робота на Землю, будет очень велика. Если для Луны эта задержка составит около 3 секунд, то для Марса эта задержка будет в разы больше, что уже значительно осложнит управление этим роботом. Так что в ближайшее время их можно будет использовать только вблизи Земли, например на Луне или на космических станциях.
Источник