Луна 17 луноход 1 год
17 ноября 1970 года с посадочной платформы автоматической межпланетной станции «Луна-17» на поверхность естественного спутника Земли в районе Моря Дождей съехал первый в мире дистанционно управляемый планетоход «Луноход-1».
Создание и запуск лунного самоходного аппарата стало важным этапом в изучении Луны. Идея создания лунохода родилась в 1965 г. в ОКБ-1 (ныне РКК «Энергия» им. С.П. Королева). В рамках советской лунной экспедиции луноходу отводилось немаловажное место. Два лунохода должны были детально обследовать предполагаемые районы прилунения и выполнять роль радиомаяков при посадке лунного корабля. Планировалось использовать луноход еще и для транспортировки космонавта на поверхности Луны.
Создание лунохода было поручено Машиностроительному заводу им. С.А. Лавочкина (ныне НПО им. С.А. Лавочкина) и ВНИИ-100 (ныне ОАО «ВНИИТрансмаш»).
Машиностроительный завод имени С.А. Лавочкина отвечал за разработку всего космического комплекса, в том числе и за создание лунохода, а ВНИИ-100 — за конструирование самоходного шасси с блоком автоматического управления движением и системой безопасности движения.
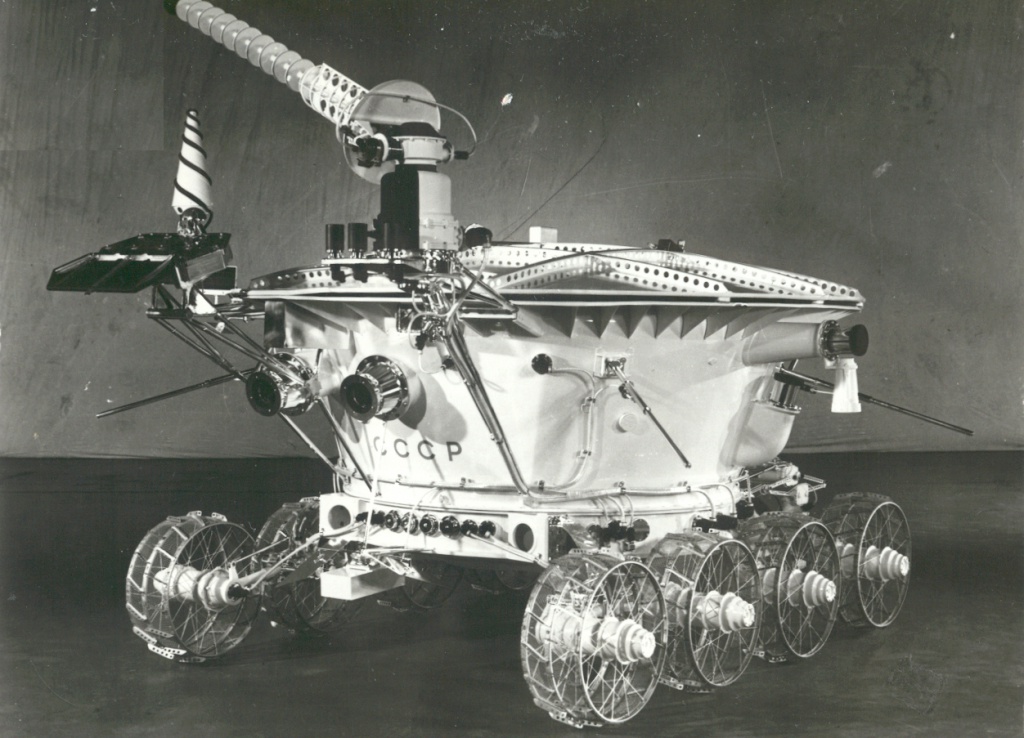
Эскизный проект лунохода был утвержден осенью 1966 г. К концу 1967 г. была готова вся конструкторская документация. «Луноход-1» представлял собой гибрид космического аппарата и транспортного средства высокой проходимости. Он состоял из двух основных частей: восьмиколесного шасси и герметичного приборного контейнера.
Каждое из 8 колес шасси было ведущим и имело электродвигатель, расположенный в ступице колеса. В приборном контейнере лунохода помимо служебных систем находилась научная аппаратура: прибор для анализа химического состава лунного грунта, прибор для исследования механических свойств грунта, радиометрическое оборудование, рентгеновский телескоп и лазерный уголковый отражатель французского производства для точечного измерения расстояний. Контейнер имел форму усеченного конуса, причем верхнее основание конуса, служащее радиатором-охладителем для сброса тепла, имело больший диаметр, чем нижнее. На время лунной ночи радиатор закрывался крышкой.
Внутренняя поверхность крышки была покрыта фотоэлементами солнечной батареи, что обеспечивало подзаряд аккумуляторной батареи в течение лунного дня. В рабочем положении панель солнечной батареи могла располагаться под разными углами в пределах 0-180 градусов, чтобы оптимально использовать энергию Солнца при различных его высотах над лунным горизонтом. Солнечная батарея и работающие с ней в комплексе химические аккумуляторы использовались для питания электроэнергией многочисленных агрегатов и, научных приборов лунохода.
Общая масса лунохода составляла 756 кг, его длина с открытой крышкой солнечной батареи 4,42 м, ширина 2,15 м, высота 1,92 м. Он был рассчитан на 3 месяца работы на поверхности Луны.
10 ноября 1970 года с космодрома БАЙКОНУР стартовала трехступенчатая ракета-носитель «Протон-К», которая вывела автоматическую станцию «Луна-17» с автоматическим самоходным аппаратом «Луноход-1» на промежуточную круговую околоземную орбиту.
Совершив неполный виток вокруг Земли, разгонный блок вывел станцию на траекторию перелета к Луне. 12 и 14 ноября были проведены плановые коррекции траектории перелета. 15 ноября станция вышла на орбиту Луны. 16 ноября была проведена коррекция траектории полета. А 17 ноября в 6 часов 46 минут 50 секунд московского времени станция «Луна-17» благополучно совершила посадку в Море Дождей на Луне. После анализа окружающей обстановки была выдана команда, и 17 ноября в 9 часов 28 минут самоходный аппарат «Луноход-1», съехал на лунный грунт.
Луноход управлялся дистанционно с Земли из Центра дальней космической связи. Для его управления был подготовлен специальный экипаж, в состав которого входили командир, водитель, штурман, оператор и бортинженер. Для экипажа были отобраны военные, не имеющие никакого опыта управления транспортными средствами, чтобы земной опыт не оказывал своего влияния при работе с луноходом.
Отобранные офицеры прошли медкомиссию почти такую же, как космонавты, теоретическое обучение и практические тренировки на специальном лунодроме в Крыму, который был идентичен лунному рельефу с углублениями, кратерами, разломами, россыпью камней различной величины.
Экипаж лунохода, получая на Земле лунные телевизионные изображения и телеметрическую информацию, с помощью специализированного пульта управления обеспечивал выдачу команд на луноход. Дистанционное управление движением лунохода имело специфические особенности, которые были связаны с отсутствием восприятия оператором процесса движения, задержками в приеме и передаче команд телевизионного изображения и телеметрической информации, а также зависимостью характеристик подвижности самоходного шасси от рельефа и свойств грунта. Это обязывало с некоторым опережением предвидеть возможное направление движения и препятствия на пути лунохода.
Весь первый лунный день экипаж лунохода приноравливался к необычным телеизображениям: картинка с Луны была очень контрастной, без полутеней.
Аппаратом управляли по очереди, через каждые два часа экипажи менялись. Изначально планировались более длительные сеансы, однако практика показала, что через два часа работы экипаж сильно уставал.
В течение первого лунного дня проводилось изучение района посадки станции «Луна-17». Одновременно проходили испытания систем лунохода и приобретение опыта вождения экипажем.
Три первых месяца помимо изучения лунной поверхности «Луноход-1» выполнял еще и прикладную программу: в рамках подготовки к готовящемуся пилотируемому полёту он отрабатывал поиск района посадки лунной кабины.
20 февраля 1971 года, по окончании четвертого лунного дня, была выполнена первоначальная трехмесячная программа работ лунохода. Анализ состояния и работы бортовых систем показал возможность продолжения активного функционирования автоматического аппарата на лунной поверхности. С этой целью была составлена дополнительная программа работы лунохода.
Успешное функционирование космического аппарата продолжалось 10,5 месяцев. За это время «Луноход-1» проехал 10 540 м, передал на Землю 200 телефотометрических панорам и около 20 тысяч снимков малокадрового телевидения. В ходе съемки были получены стереоскопические изображения наиболее интересных особенностей рельефа, позволяющие провести детальное изучение их строения.
«Луноходом-1» регулярно проводились измерения физико-механических свойств лунного грунта, а также химический анализ поверхностного слоя лунного грунта. Он измерял магнитное поле различных участков лунной поверхности. Лазерная локация с Земли установленного на луноходе французского отражателя позволила измерить расстояние от Земли до Луны с точностью до 3 м.
15 сентября 1971 года, при наступлении одиннадцатой лунной ночи, температура внутри герметичного контейнера лунохода стала падать, так как исчерпался ресурс изотопного источника тепла в системе ночного подогрева. 30 сентября в месте стоянки лунохода наступил 12 лунный день, но аппарат так на связь и не вышел. Все попытки войти с ним в контакт были прекращены 4 октября 1971 года.
Общее время активного функционирования лунохода (301 сутки 6 часов 57 минут) более чем в 3 раза превысило заданное по техническому заданию.
Источник
Автоматическая станция «Луна-17»
Обзор проекта
Основные задачи
Описание миссии
Научная аппаратура
Значимость миссии
Галерея
10 ноября 2020 года исполняется 50 лет с даты запуска автоматической межпланетной станции «Луна-17», которая доставила на поверхность Луны «Луноход-1» – первую в мире автоматическую самоходную лабораторию, полностью управляемую с Земли.
Космический аппарат «Луна-17» доставил на поверхность Луны самоходный аппарат «Луноход-1» для проведения научных исследований на лунной поверхности.
«Луноход-1» прошел расстояние 10 540 метров, за это время на Землю было передано 200 телефотометрических панорам и около 20 тысяч снимков малокадрового телевидения. В ходе съемки получены стереоскопические изображения наиболее интересных особенностей рельефа, позволяющие провести детальное изучение их строения.
Автоматический космический аппарат состоял из корректирующе–тормозного модуля (КТ) и самоходного аппарата. Корректирующе–тормозной модуль КТ предназначен для обеспечения перелета по трассе Земля–Луна, включая коррекции траектории, выход на орбиту искусственного спутника Луны, формирование предпосадочной окололунной орбиты, сход с орбиты и посадку на лунную поверхность.
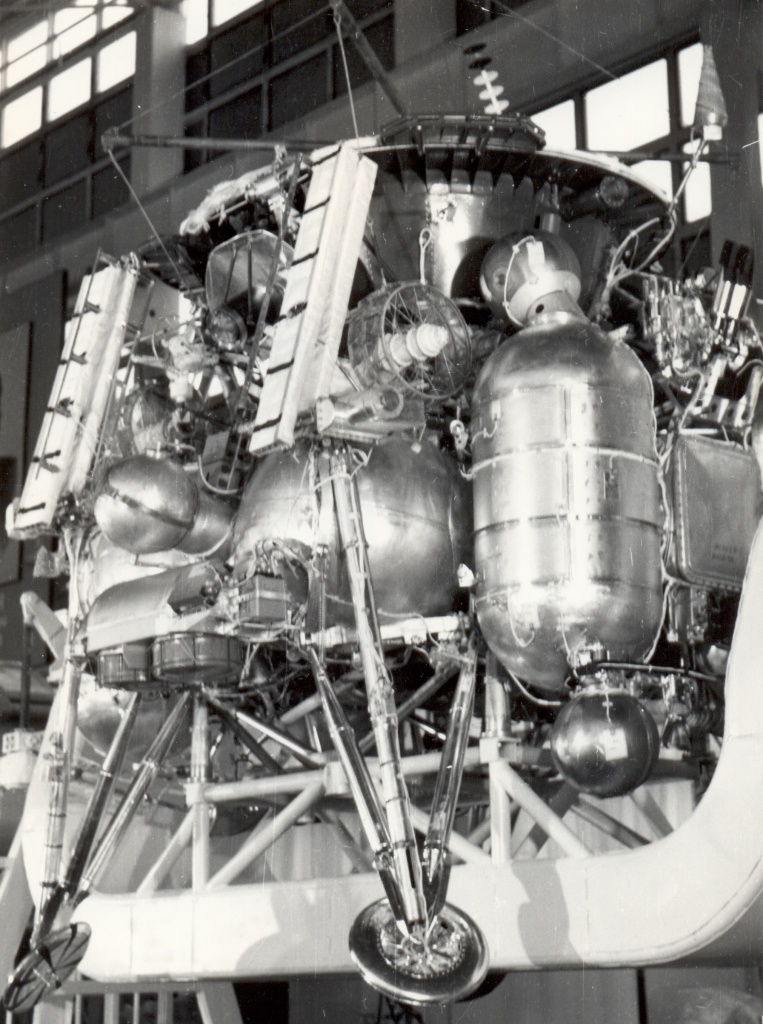
Основу конструкции КТ составляли четыре сферических топливных бака, соединенных между собой цилиндрическими проставками, две из которых выполняли роль приборных отсеков для размещения аппаратуры системы управления перелетом и посадкой. Часть аппаратуры системы управления, предназначенная для управления работой блока Д, была размещена на переходной ферме.
Помимо основных баков топливо размещалось еще и в баках сбрасываемых отсеков. Сброс отсеков производился перед включением двигателя для схода с орбиты ИСЛ. Двигательная установка корректирующе–тормозного модуля КТ состояла из основного двигателя с регулируемой тягой и блока двигателей малой тяги с номинальной тягой 280 кг. Суммарная тяга двигателя могла изменяться в пределах 1929 — 750 кг.
На посадочной ступени установлен автоматический самоходный аппарат — «Луноход-1», который состоит из двух основных частей: колесного шасси и герметичного приборного контейнера, в котором размещена вся служебная аппаратура. Контейнер имеет форму усеченного конуса, причем верхнее основание конуса, служащее радиатором–охладителем для сброса тепла, имеет больший диаметр, чем нижнее. На время лунной ночи радиатор закрывался крышкой.
Внутренняя поверхность крышки покрыта фотоэлементами солнечной батареи, что обеспечивает подзаряд аккумуляторной батареи в течение лунного дня. В рабочем положении панель солнечной батареи может располагаться под разными углами в пределах 0-180°, чтобы оптимально использовать энергию Солнца при различных его высотах над лунным горизонтом.
В передней части приборного отсека расположены иллюминаторы для телевизионных камер, электрический привод подвижной остронаправленной антенны, предназначенной для передачи на Землю телевизионных изображений лунной поверхности, малонаправленная антенна, обеспечивающая прием радиокоманд с Земли и передачу телеметрической информации, научные приборы и оптический уголковый отражатель.
В состав телевизионного комплекса, предназначенного для получения информации об окружающем луноход пространстве, входили малокадровая телевизионная система, предназначенная для получения изображений лунной поверхности, необходимых для оперативного управления движением и фототелевизионная система.
Для получения панорамных изображений и съемки участков звездного неба, Солнца и Земли, необходимых для астроориентации лунохода и не требующих высоких скоростей передачи изображения, на борту лунохода была установлена телефотометрическая или фототелевизионная оптико–механическая система с панорамной разверткой, состоящая из четырех камер. Они расположены таким образом, что две из них обеспечивают обзор местности справа и слева от лунохода в пределах несколько более 180° в горизонтальной плоскости и 30° в вертикальной, а две другие камеры дают изображение местности и пространства в пределах 360° в вертикальной и 30° в горизонтальной плоскостях.
По левому и правому борту установлено по две панорамные телефотокамеры (причем в каждой паре одна из камер конструктивно объединена с определителем местной вертикали) и четыре штыревые антенны.
В задней части приборного отсека расположен радиоизотопный источник тепла, а рядом с ним — прибор для определения физико–механических свойств лунного грунта (прибор оценки проходимости — ПРОП) и механизм подъема и опускания девятого колеса.
Приборный отсек установлен на восьмиколесном шасси, обеспечивающем передвижение автоматической лаборатории по поверхности Луны. Геометрия ходовой части, удельное давление на грунт, тяговые характеристики шасси, параметры упругой подвески и конструкция опорной поверхности колес позволяли уверенно передвигаться по поверхности с рыхлым, сыпучим слоем грунта, преодолевать крутые подъемы, переезжать через кратеры и препятствия в виде отдельных камней или гряды камней, соизмеримых с размерами ходовой части. Каждое колесо имеет три титановых обода, покрытых сеткой из нержавеющей стали и соединенных грунтозацепами. Ступица колеса соединена с ободом спицами. Колеса, трансмиссии и двигатели объединены в единые узлы — мотор–колеса. Луноход имеет восемь мотор–колес, каждое из которых является ведущим. Все колеса неповоротные относительно вертикальной оси. Поэтому для разворота лунохода на месте каждая четверка колес либо вращается в противоположном направлении, либо в одном, но с разной скоростью.
Диаметр каждого из восьми ведущих колес по грунтозацепам составляла 510 мм, ширина 200 мм. Колесная база шасси — 170 мм, а ширина колеи 1600 мм.
Для обеспечения заданного теплового режима внутри гермоконтейнера в условиях лунной ночи был использован радиоизотопный источник тепла, содержащий ампулы с полонием-210. Двухконтурная воздушная система терморегулирования обеспечивала сброс тепла в течение лунного дня через верхнее днище приборного отсека, которое одновременно являлось радиатором–охладителем. На его наружной поверхности было нанесено специальное термооптическое покрытие, состоящее из зеркальных элементов из кварцевого стекла. Для уменьшения стока тепла из приборного отсека через радиатор–охладитель на время лунной ночи закрывался теплоизолированной крышкой, на внутренней поверхности которой расположены фотопреобразователи солнечной батареи. Для дополнительного охлаждения газа в наиболее теплонапряженных сеансах применялся водяной испаритель.
Луноход управлялся дистанционно. В состав дистанционной системы управления входили система курсоуказания, обеспечивавшая передачу на Землю информации об угловом положении аппарата. Кроме того, курсовой гироскоп обеспечивал движение в заданном направлении с учетом объезда препятствий.
Для получения информации о дорожных условиях, необходимой для управления движением лунохода, о пройденном пути и для проведения научных экспериментов по исследованию свойств грунта, на корме лунохода был установлен входящий в состав самоходного шасси прибор оценки проходимости (ПРОП). Он состоял из мерного (девятого) колеса и механизмов для внедрения и поворота в грунте штампа, позволяющего получить информацию о физико–механических свойствах лунного грунта. С помощью мерного колеса определялся пройденный путь.
Дополнительно на луноходе был установлен датчик лунной вертикали, который представлял собой чашу со сферической внутренней поверхностью, по которой свободно перекатывался шарик.
Управление самоходным аппаратом из Центра управления луноходом осуществлял экипаж, в состав которого входили командир, водитель, штурман, оператор и борт–инженер. Экипаж лунохода, получая на Земле лунные телевизионные изображения и телеметрическую информацию, с помощью специализированного пульта управления обеспечивал выдачу команд на луноход.
Стартовая масса космического аппарата составляла 5700 кг, после выхода на селеноцентрическую орбиту — 4100 кг, а на поверхности Луны — 1900 кг. Общая масса лунохода составляла 756 кг, его длина с открытой крышкой солнечной батареи 4,42 метра, ширина 2,15 метра, высота 1,92 метра. Он был рассчитан на 3 месяца работы на поверхности Луны.
На «Луноходе-1» и посадочной ступени «Луны-17» были установлены флаги и вымпелы с изображением Государственного герба СССР и барельефом В. И. Ленина.
- Назначение планетные исследования
- Статус выведен из эксплуатации,
- Объект исследований Луна
- Дата запуска 10 ноября 1970
- Космодром Байконур
- Средства выведения «Протон–К» с разгонным блоком Д
- Масса аппарата 5700 кг; масса «Лунохода-1»: 756 кг
- Рабочая орбита перелет к Луне
- Срок активного существования Успешное функционирование космического аппарата продолжалось 10,5 месяцев.
Космический аппарат «Луна-17» был предназначен для доставки на поверхность Луны самоходного аппарата «Луноход-1» и проведения научных исследований на лунной поверхности.
Космический аппарат «Луна-17» был запущен 10 ноября 1970 года в 17 часов 44 минуты 01 секунду с помощью ракеты–носителя «Протон–К». Первые три ступени ракеты–носителя и разгонный блок обеспечили выведение космического аппарата на траекторию полета к Луне. Старт к Луне осуществлялся с промежуточной околоземной орбиты.
На трассе перелета к Луне 12 и 14 ноября были проведены коррекции траектории. 15 ноября при подлете к Луне был включен двигатель на торможения, и станция «Луна-17» вышла на орбиту искусственного спутника Луны высотой 85х141 км наклонением орбиты к плоскости лунного экватора — 141° и периодом обращения 116 минут.
С целью формирования условий для схода с орбиты 16 ноября прошли коррекции, в результате которых минимальная высота над поверхностью снизилась до 19 км. 17 ноября 1970 года в 6 часов 41 минут был включен тормозной двигатель, и в 6 часов 46 минут 50 секунд станция «Луна-17» совершила мягкую посадку в прибрежном районе западной части Моря Дождей, в точке с селенографическими координатами: 38°24′ с. ш. и 34°47′ з. д.
После осмотра места посадки и развертывания трапов была выдана соответствующая команда, и в 9 часов 28 минут «Луноход-1» съехал по трапу с посадочной платформы на лунный грунт. Автоматическая самоходная лаборатория приступила к выполнению программы научно–технических исследований и экспериментов. В течение первого лунного дня проводилось изучение района посадки станции «Луна-17». Одновременно проходили испытания систем лунохода и приобретение опыта вождения экипажем, находящемся на Земле. За это время луноход прошел по лунной поверхности 197 метров.
К 19 февраля запланированная трехмесячная программа научно–технических исследований и экспериментов была выполнена полностью. За 4 лунных дня самоходная лаборатория преодолела расстояние в 5228 м.
Анализ состояния и работы бортовых систем показал возможность продолжения активного функционирования автоматического аппарата на лунной поверхности. С этой целью была составлена дополнительная программа работы лунохода. Успешное функционирование космического аппарата продолжалось 10,5 месяцев.
В начале 12–го лунного дня (30 сентября 1971 г.) войти в связь с луноходом не удалось.
Общее время активного функционирования лунохода (301 сутки 6 часов 57 минут) более чем в 3 раза превысило заданное по ТЗ.
Программа полета станции «Луна-17» и самоходного аппарата «Луноход-1» была выполнена полностью.
- автоматическая спектрометрическая аппаратура РИФМА для определения химического состава лунного грунта;
- радиометр РВ-2Н для исследования радиационной обстановки на трассе перелета и на поверхности Луны;
- коллиматорный рентгеновский телескоп РТ-1 для исследования рентгеновского космического излучения.
В ходе выполнения программы работы за 116 сеансов движения «Луноход-1» прошел расстояние 10 540 метров, что позволило детально обследовать лунную поверхность на площади 80 000 м2. Максимальная скорость движения составляла 2 км/час. За это время на Землю было передано 200 телефотометрических панорам и около 20 тысяч снимков малокадрового телевидения. В ходе съемки получены стереоскопические изображения наиболее интересных особенностей рельефа, позволяющие провести детальное изучение их строения.
Топографическое изучение местности выполнялось на основе телевизионных панорам, снимков лунного ландшафта и данных о длине пройденного пути.
В итоге обследования луноходом района посадки станции «Луна-17» были построены: топографическая схема трассы в масштабе 1:1000, уточненные схемы отдельных участков в масштабе 1:200, топографические планы отдельных участков в масштабе 1:100, полученные стереофотографическим методом, высотные профили трассы и характерных кратеров.
В течение всего срока активного существования лунохода регулярно проводились измерения физико–механических свойств лунного грунта.
С помощью автоматической спектрометрической аппаратуры РИФМА была получена информация о химическом составе лунного грунта — своем составе он имел следующие элементы: кремний (20%), железо (12%), кальций (8%), алюминий (7%), магний (7%), титан (
Источник