«Луноход-1» был запущен 50 лет назад. Как он был устроен и для чего нужен?
10 ноября 1970 года советские астрономы успешно запустили в космос первый в мире планетоход с дистанционным управлением. Им стал «Луноход-1», который достиг поверхности Луны 17 ноября 1970 года и проработал на ней вплоть до 14 сентября 1971 года. За это время он проехал 10 540 метров и изучил особенности лунного грунта, а также другие свойства космического объекта. С этого момента прошло ровно 50 лет и это отличный повод, чтобы рассказать обо всех ключевых моментах миссии. Ведь запуск первого планетохода — это не просто взять и отправить его в сторону Луны. Все происходило гораздо сложнее. Стоит начать с того, что для отправки аппарата использовалась межпланетная станция «Луна-17», которая вместе с луноходом до сих пор лежит на поверхности Луны.
Запуск «Лунохода-1»
Как и говорилось выше, для отправки «Лунохода-1» на Луну была использована межпланетная станция «Луна-17». Он был выведен на орбиту нашей планеты при помощи ракеты-носителя «Протон». Выведение космического аппарата на траекторию полета к Луне обеспечили первые три ступени носителя и разгонный блок. Запуск произошел 10 ноября 1970 года в 17 часов 44 минуты 01 секунду с расположенного в Казахстане космодрома Байконур.

Межпланетная станция «Луна-17»
Полет до Луны занял целую неделю. Межпланетная станция «Луна-17» управлялась с Земли и 12 и 14 ноября 1970 года астрономы слегка изменили траекторию его движения, чтобы в конечном итоге аппарат достиг заранее отмеченной точки на поверхности земного спутника. Станция подлетела к Луне 15 ноября и вышла на орбиту. Снижение аппарата начало происходить 16 ноября, а уже 17 ноября, в 6 часов 46 минут 50 секунд, станция «Луна-17» совершила успешную посадку. Местом посадки стало так называемое Море дождей (Mare Imbrium), расположенное в северо-западной части видимой с Земли стороны Луны.
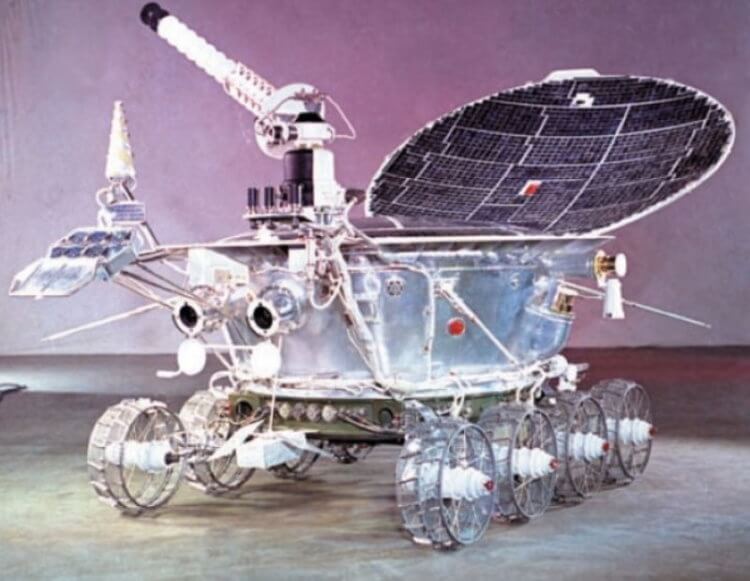
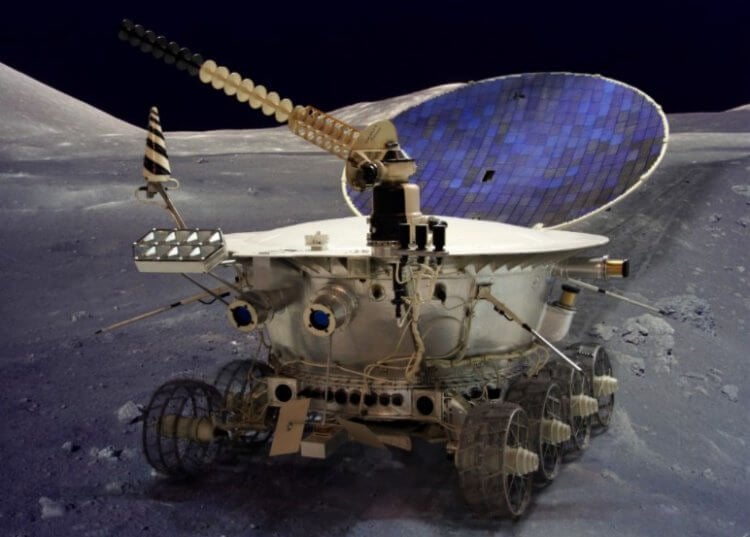
Цветная фотография «Лунохода-1»
Искусственный спутник Луны — автоматическая станция, которая движется по орбите Луны для изучения его особенностей. Самым первым из них была «Луна-10», запущенная в 1966 году. О том, как работают спутники, можно почитать в этом материале.
После тщательного осмотра места посадки, в в 9 часов 28 минут того же дня «Луноход-1» съехал на лунный грунт. С этого момента первый в мире планетоход приступил к изучению поверхности Луны.
Конструкция «Лунохода-1»
В цели «Лунохода-1» входили изучение особенностей лунной поверхности, выяснение уровня радиоактивного и рентгеновского космического излучения, а также анализ химического состава лунного грунта. Аппарат весил 756 килограмм, оснащался восемью колесами и мог двигаться со двумя скоростями — 0,8 и 2,0 километров в час. Колеса с металлической сеткой позволяли ему проходить через выступы высотой 35 сантиметров и трещины шириной до 1 метра. На верхней части корпуса имелась солнечная батарея, которая заряжала аккумулятор.
Оборудование «Лунохода-1» состояло из шести частей:
- камер для снятия фотографий. Одна из них была рабочей, а вторая — запасной;
- спектрометра для измерения интенсивности электромагнитного излучения;
- рентгеновского телескопа для наблюдения удаленных объектов в рентгеновском спектре;
- одометра для измерения оборотов колеса. При помощи него астрономы вычислили, какое расстояние проехал луноход;
- детектора радиации для слежения за уровнем радиационной активности;
- лазерного рефлектора для измерения расстояния между Землей и Луной.
Также на корпусе аппарата имелись антенны для связи с Землей. Для управления «Луноходом-1» использовался специальный пульт. Пилотом аппарата был Вячеслав Довгань — кандидат военных наук и автор более 120 научных работ.

Вячеслав Довгань за пультом управления «Луноходом-1»
Успехи «Лунохода-1»
«Луноход-1» проработал на поверхности земного спутника 302 дня и преодолел 10 540 метров со средней скоростью 0,14 километров в час. Максимальная скорость, которую он смог набрать, составила 2 километра в час. Важно отметить, что большую часть времени он находился в неподвижном состоянии и занимался сбором научных данных. При помощи своего оборудования он сделал и передал на Землю более 20 000 изображений, 206 панорамных снимков и 25 рентгеновских анализов химического состава лунного грунта. Также он часто использовал пенетрометр — устройство, которое вводит инструмент в вязкую среду и оценивает его густоту. При помощи него исследователи получили информацию о физических свойствах поверхности Луны.
Если вам интересны новости науки и технологий, подпишитесь на наш канал в Яндекс.Дзен. Там вы найдете материалы, которые не были опубликованы на сайте!
Успешный запуск «Лунохода-1» позволил СССР сделать рывок в космической гонке с США во второй половине XX века. О других советских достижениях в области космонавтики можно почитать в этом материале.
Источник
Луноход-1. История создания и интересные факты
Луноход-1 — первый лунный самоходный аппарат. Он был доставлен на поверхность Луны 17 ноября 1970 года, советской межпланетной станцией Луна-17 и проработал на её поверхности до 4 октября 1971 года. Предназначался для изучения особенностей лунной поверхности, радиоактивного и рентгеновского космического излучения на Луне, химического состава и свойств грунта.

Луноход-1 был создан в конструкторском бюро химкинского Машиностроительного завода имени С. А. Лавочкина под руководством Григория Николаевича Бабакина. Самоходное шасси для Лунохода было создано во ВНИИТрансМаш под руководством Александра Леоновича Кемурджиана.
Эскизный проект лунохода был утвержден осенью 1966 года. К концу 1967 года была готова вся конструкторская документация.
Автоматическая межпланетная станция Луна-17 с Луноходом-1 стартовала в 10 ноября 1970 года и 15 ноября Луна-17 вышла на орбиту искусственного спутника Луны.
17 ноября 1970 года станция благополучно прилунилась в Море Дождей и Луноход-1 съехал на лунный грунт.
Управление исследовательским аппаратом осуществлялось при помощи комплекса аппаратуры контроля и обработки телеметрической информации на базе «Минск-22» — СТИ-90. Центр управления луноходом в Симферопольском Центре космической связи включал в себя пункт управления луноходом, который состоял из пультов управления командира экипажа, водителя лунохода и оператора остронаправленной антенны, рабочее место штурмана экипажа, а также зал оперативной обработки телеметрической информации.
В течение первых трёх месяцев запланированной работы, помимо изучения поверхности аппарат выполнял еще и прикладную программу, в ходе которой отрабатывал поиск района посадки лунной кабины. После выполнения программы луноход проработал на Луне в три раза больше своего первоначально рассчитанного ресурса. За время нахождения на поверхности Луны «Луноход-1» проехал 10 540 м, передал на Землю 211 лунных панорам и 25 тысяч фотографий. Более чем в 500 точках по трассе движения изучались физико-механические свойства поверхностного слоя грунта, а в 25 точках проведён анализ его химического состава.
15 сентября 1971 года температура внутри герметичного контейнера лунохода стала падать, так как исчерпался ресурс изотопного источника тепла. 30 сентября аппарат на связь не вышел и 4 октября все попытки войти с ним в контакт были прекращены.
11 декабря 1993 года Луноход-1 вместе с посадочной ступенью станции Луна-17 были выставлен фирмой Lavochkin Association на аукционе Сотбис. При заявленной начальной цене 5 000$ торги закончились на сумме 68 500$. По информации российской прессы, покупателем оказался сын одного из американских астронавтов. В каталоге было указано, что лот «покоится на поверхности Луны».
ВНИИТрансМаш
Основным разработчиком шасси для планетоходов (колеса, двигатели, привод, подвеска, система управления ими) в СССР был (и остается до настоящего времени в России) ленинградский ВНИИтрансмаш (ВНИИТМ). В этом учреждении разрабатывались главным образом шасси для танков, так что был накоплен обширный опыт в области создания транспорта повышенной проходимости, ведь общее свойство у планетохода и танка — движение по неподготовленной местности.
В одном из цехов ВНИИТМ
Здесь было создано и испытано множество самых различных устройств — Луноход 1 и 2 (1970), шагающий планетоход отправленный в 1971 году на Марс, прыгающий для Фобоса (1988), робот для очистки крыши разрушенного энергоблока Чернобыльской АЭС (1986), планетоход для неудавшейся экспедиции Марс-96, несколько планетоходов в рамках сотрудничества с зарубежными организациями (в последние годы) и т.д.
Наверное многие обратили внимание, что все луноходы, которые перемещались по другим планетам — колёсные. И это при том, что давно известно множество других подходов — гусеничный, шагающий и т.д. Видимо, есть серьезные причины выбирать именно колеса.
Почти все небесные тела которые доступны нам для исследования имеют твердую поверхность с множеством относительно ровных участков. Там нет болот, зыбучих песков, леса и растительности, которые могли бы потребовать гусениц или шагающих движителей. На Луне и Марсе, также как на Меркурии и Венере — везде колеса вполне можно использовать.
Колёса — очень экономичный вид движителя. Чтобы прокручивать, скажем, гусеницы, нужна куда большая мощность. А ведь это дополнительные батареи, которые нужно доставлять за сотни тысяч километров.
Важна и надежность — проблематично заменить на Марсе порванную гусеницу или сломанный рычаг ноги, в то время как поломка даже нескольких колес совсем необязательно ставит под угрозу выполнение задачи.
Теория движения колесных машин также разработана лучше всего. Достаточно вспомнить, что до сих пор почти не нашли применения шагающие машины, даже в хорошо изученных земных условиях.
Сравнительно прост и привод колес от электромоторов, легко обеспечивать разворот.
Итак, выбор колёсного движителя явно оправдан. Далее мы рассмотрим несколько вариантов колёс созданных во ВНИИТМ
Колёса Лунохода
______________
Колеса Лунохода уже можно считать классикой. Большинство последующих макетов и реальных планетоходов хоть что-то, да позаимствовали от них. Колеса состоят из трех титановых ободов, с закрепленной на них стальной сетки с грунтозацепами из того же титана. На твердой поверхности опора происходит на средний обод, на мягком же грунте обод проникает глубоко и тогда работает сетка.
Пробные варианты колёс для Лунохода
Это два пробных варианта колес для Лунохода. Колесо подрессоривается, в одном случае, с помощью упругих металлических лент, в другом — с помощью цилиндрических пружин вдоль оси колеса.
Еще один вариант — здесь внешняя поверхность колеса сделана из упругой сетки, однако под сеткой размещены ленточные пружины, которые работают когда при ударах сетка проминается. Профиль колеса мешает боковому сползанию. Грунтозацепы (в середине) работают главным образом при прогибании сетки на твердых грунтах.
Для планет с сильной гравитацией (Марс, Земля) от непрочной сетки отказываются в пользу сплошной поверхности с грунтозацепами (оболочковое колесо). В случае с марсоходами ученые исходили из первых фотографий «Викинга» где поверхность Марса выглядела каменистой.
Как видно, во всех конструкциях стараются обеспечить хорошую сцепляемость с грунтом (грунтозацепы, сетка), небольшой вес (отсутствие сплошных дисков, по возможности сетка и спицы, либо сплошное но полое колесо), подрессоривание (спицы, пружины и т.п.), меры против бокового сползания (характерный выпуклый либо вогнутый профиль).
Почти во всех колесных планетоходах колесо представляет собой единый (часто даже герметизированный) модуль, включающий также редуктор, электромотор, тормоз, необходимые датчики. Называется такой модуль «мотор-колесо». Применение мотор-колес позволяет, наряду с подвеской, обеспечивать равную нагрузку на все колеса и эффективное использование мощности на неровностях ландшафта, при повисании части колес в воздухе и т.п.
Мотор-колесо в разрезе
Если же рассматривать колесный движитель в целом, возникает вопрос — почему у планетоходов, в частности Лунохода, столько колёс?
Во-первых, до последнего момента не исключалось использование гусениц. В случае с 8 колесами Лунохода это не потребовало бы полного пересмотра конструкции. Во-вторых, снижение нагрузки на грунт. И наконец, надежность — работоспособность при выходе из строя нескольких колес.
На случай заедания в приводе колес в Луноходе были предусмотрены специальные механизмы разблокировки. Пиротехнический заряд по команде с Земли мог перебить вал и в результате неисправное заблокированное колесо стало бы ведомым. У четырех колесного такое было бы невозможно. К счастью, эта возможность не была ни разу использована
Подвеску делают независимой для каждого мотор-колеса. Это позволяет преодолевать небольшие выступы и впадины избегая сильных кренов всей машины и перегрузки отдельных двигателей. В идеале, каждое колесо в любой момент времени должно касаться грунта, причем с примерно одинаковыми нагрузками от взаимодействия с ним. Это обеспечивается не только механикой, но и электронной частью, оценивающей нагрузки на двигатели, и подвеску. Механическая часть подвески обычно выполняется в виде рычагов, причем в качестве упругих элементов используются торсионы — стальные или титановые стержни, которые представляют собой «пружину» работающую на кручение. Использование гидравлики проблематично, из-за сильных колебаний температуры на поверхности планет.
Торсион
_______
Поучительна история гибели Лунохода-2 — на нем был установлен новый датчик крена-дифферента (весь блок автоматики Лунохода-2 разрабатывался с тройным дублированием — как для обитаемой машины).
Датчик в Луноходе-1 был разработан самим ВНИИТМ, но посчитали, что машиностроительное предприятие должно заниматься своим делом и разработку нового датчика поручили другой организации.
В новом датчике использовалась незамерзающая жидкость. Однако, не была учтена малая сила тяжести на Луне. В результате, сразу после прилунения, датчик оказался нерабочим. А ведь этот датчик должен предохранять Луноход от опрокидывания — автоматически останавливать его, если наклон слишком велик (попутно — позволяет получить представление о геометрии лунной поверхности). Здесь же он показал что Луноход стоит под углом 40 градусов еще до съезда с посадочного модуля.
Пришлось ездить без датчика, ориентируясь лишь на то, что видно через телекамеры — линию горизонта и простой уровень — катающийся металлический шарик. Все шло хорошо, но на третий месяц Луноход заехал в довольно большой кратер. Он стоял там с открытой солнечной батареей и подзаряжался. Когда пришло время выезжать из кратера, недооценили угол наклона. В результате, машина зацепилась солнечной батареей, на нее попал грунт, что привело к падению мощности. Попытки стряхнуть грунт только усугубили положение — грунт попал во внутренний отсек. Так закончил свою жизнь Луноход-2.
Кстати говоря, Луноходу-1 повезло еще меньше — при старте взорвался ракетоноситель. Так что тот Луноход-1 что был на Луне — не совсем первый Луноход.
В любом случае Луноход-2 прошел по Луне намного большее расстояние — 40 км за 3 месяца, чем Луноход-1 — 10 км. за 10 месяцев. Сказался опыт, который приобрели исследователи и водители.
Камера для имитации атмосферы планет и марсоход в ней
Источник