Космический «Аватар» : на что способен новый робот-спасатель FEDOR

Вице-премьер Дмитрий Рогозин на днях опубликовал видео испытаний антропоморфного робота, создаваемого Фондом перспективных исследований совместно с НПО «Андроидная техника» по заказу МЧС РФ.
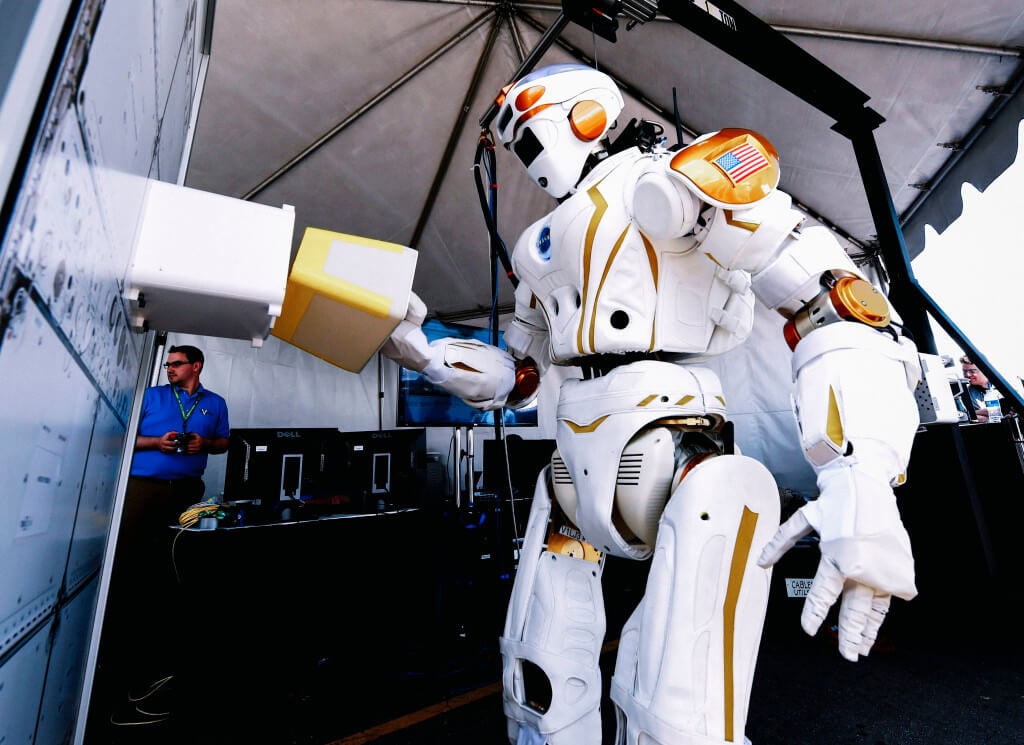
Известный ранее под названием «Аватар», робот получил новое имя — FEDOR — Final Experimental Demonstration Object Research (Финальный экспериментальный демонстрационный объект исследований) и новую профессию. Теперь он будет не только спасать людей из-под завалов, но и летать в космос.
Разработка робота «Аватар» в рамках проекта «Спасатель» началась в 2014 года. В декабре 2015 года указом президента был создан Национальный центр развития технологий и базовых элементов робототехники, который взял на себя координацию проекта.
«Робот FEDOR создан по проекту «Спасатель». А то, что антропоморфный робот применим в самых разных областях, это не удивительно, потому что ставилась задача создать робота, который способен заменить человека в той инфраструктуре, в которой действует человек», — рассказал ТАСС руководитель проекта «Спасатель» Национального центра развития технологий и базовых элементов робототехники Сергей Хурс.

На полосе препятствий
В ближайшее время FEDOR должен пройти полосу препятствий: управлять автомобилем, пройти по маршруту в типовом здании, преодолеть специальную полосу препятствий, продемонстрировать обращение с ручными электроинструментами и обращение со специальными инструментами, применяемыми МЧС — гидравлическим разжимом и домкратом.
«Это обязательный минимум, который входит в этот проект», — пояснил Хурс.
Управление роботом должно быть совмещенное: часть функций он должен выполнить автоматически, часть – копируя движения оператора.
В перспективе робот должен не просто войти в здание и подняться по лестнице, но открыть дверь ключом, включить свет, открыть кран с водой. «Ставится задача дойти до очень мелкой моторики. Хотелось бы, чтобы робот научился зажигать спички», — рассказал Хурс о перспективах проекта.
«Весь сентябрь FEDOR тем и занимался, что проходил испытания, предусмотренные техническим заданием, в том числе и полосу препятствий. Если говорить, можно ли считать испытания пройденными, то так сказать можно. Но это еще не сдача проекта заказчику. Еще есть что шлифовать», — рассказал Хурс.
Профессии для робота
После демонстрации умений FEDOR, видеосъемку которых вице-премьер Рогозин выложил в сеть, он поручил Фонду перспективных исследований совместно с Ракетно-космической корпорацией «Энергия» адаптировать робота для участия в полете перспективного пилотируемого корабля «Федерация».
На околоземной орбите FEDOR может использоваться для оказания помощи космонавтам во время работ в открытом космосе, а в перспективе и полностью заменить их в этой работе.
«Каждый выход человека в открытый космос – подвиг, требующий подготовки и мужества. Если по каждому пустяку не нужно будет рисковать человеком, а их задачи будут выполнять автоматические устройства, конечно, это будет намного лучше», — рассказал Хурс.
Роботу предстоит работать в условиях вакуума, серьезных перепадов температур. Собратья робота FEDOR смогут опускаться на дно океана, работать на предприятиях атомной и химической промышленности.
«Они смогут использоваться везде, где человека целесообразно заменить, чтобы не подвергать его жизнь и здоровье опасности», — сообщил руководитель проекта «Спасатель».
«Профессий у этого робота очень много, потому мы и создали такую сложную полосу препятствий. Мы научили его водить автомобиль не потому, чтобы он заменил водителей, а на случай, если ему придется заменить человека в опасной ситуации и сесть за руль», — пояснил Хурс.
Сейчас FEDOR управляется тремя способами: через радиосвязь, оптоволокно или обычный электрический кабель.
Питание на системы робота подается либо через кабель, либо за счет навешиваемых в качестве рюкзака на спину аккумуляторов. Батареи позволяют обеспечить от получаса до часа автономной работы.
«Сейчас в рамках других проектов разрабатываются такие источники питания, которые придадут ему автономность, исчисляемую часами», — пояснил Хурс.
Однако, вопрос автономности, отметил он, не ставится во главу угла. «Если робот выполняет операции, опасные для людей, то, думаю, сменить раз в час батарею — не проблема», — уточнил он.
Помимо дистанционного копирования действий оператора, автономного выполнения заложенных задач, Федор сможет распознавать и выполнять голосовые команды человека.
«Оператору не нужно будет нажимать никакие кнопки. Все команды могут быть поданы голосом, а чтобы удостовериться, что команда была воспринята правильно, робот повторит отданную ему команду голосом и после этого приступит к ее выполнению», — сказал Хурс.
Главное умение, которое разработчики закладывают в автономный режим робота – умение стоять на ногах, т.е. поддерживать равновесие вне зависимости от поверхности, по которой двигается робот, или воздействия со стороны, т.е. ударов, попыток опрокинуть робота.
«Вестибулярный аппарат человека работает автоматически, и мы об этом даже не задумываемся. Нужно чтобы и оператор не думал о том, как сохранять равновесие в момент управления роботом. Это должна быть задача бортовой системы управления», — рассказал специалист.
База автономных движений, которые робот сможет выполнять самостоятельно, постоянно будет пополняться. Разработчики предлагают привлечь к пополнению библиотеки стандартных движений студентов профильных вузов.
Однако от телеоператорного режима управления, т.е. копирования действий человека-оператора, робот избавится еще не скоро, учитывая, что создание искусственного интеллекта пока не привело к желаемым результатам.
«Интеллект человека в робототехнике не заменить еще долгое время, но его можно максимально автоматизировать, чем мы и занимаемся. Автоматизация функций позволяет оператору не заниматься мелочами, вроде поддержания равновесия робота. Иначе это будет ребенок, вокруг которого будут суетиться няньки, а нужно наоборот, чтобы робот был помощником человеку», — подчеркнул Хурс.
Источник
Федор и его дети


Космическая робототехника стремительно набирает обороты. О ее перспективах конструкторы, инженеры, космонавты говорили за круглым столом в ЦПК им. Ю.А. Гагарина в Звездном городке. Отправной точкой стали итоги работы на МКС первого российского робота-аватара «Федор» (или, как его еще назвали, Skybot F-850), созданного НПО «Андроидная техника» вместе с Фондом перспективных исследований.

Напомним, «Федор» полетел на орбиту в рамках тестового запуска модернизированного корабля «Союз МС-14» и ракеты-носителя «Союз‑2.1а». Людей на борту не было. Пришлось скучать в качестве одинокой «полезной нагрузки».
На самой станции не обошлось без приключений. И корабль причалил со второй попытки. И аватара удалось подключить не сразу. Но на то он и эксперимент, чтобы все проверить и отточить.
«Федор» неплохо орудовал дрелью, отверткой. И даже собрал из деталей электрическую конструкцию, для чего соединял контакты и разъемы. А еще подавал полотенце. У робота 42 степени подвижности: головы, шеи, плеч, локтей, кистей и пальцев рук. В невесомости отрабатывалась в основном мелкая моторика.
На расстоянии андроидом управлял космонавт Александр Скворцов. На него был надет специальный экзоскелет, который позволяет аватару повторять движения человека. Официально такой костюм называется ЗУКТ: расшифровывается как «задающее устройство копирующего типа». Другой наш космонавт — Алексей Овчинин — следил за тем, что делает «Федор». Разговаривал с ним.
«Сегодня провели серию работ с бортовыми инструментами, которые могут понадобиться для внекорабельной деятельности. Работа с электродрелью проходила под постоянным контролем Алексея Николаевича Овчинина», — это одна из записей в «Твиттере» Skybot F-850.
Поскольку это был научный эксперимент, все строго фиксировалось. Так, Овчинин потратил на работу с аватаром 29,5 часа, Скворцов — 28 часов. Сейчас результаты анализируются. Надо сказать, что «Федор» в космос больше не полетит. По крайней мере, в таком виде, в каком он есть. Полетят, как выразился исполнительный директор Роскосмоса по перспективным программам и науке Александр Блошенко, «дети Федора».
Конструкторы уже создают специального робота для решения задач в открытом космосе. Проект называется «Теледроид». Кстати, специалисты шутят: самая бесполезная деталь у «механика», которому придется работать за бортом станции — ноги. Поэтому «Теледроида» инженеры наделили торсом человека лишь с руками. Такой робот предназначен для эксплуатации на внешней поверхности Научно-энергетического модуля Международной космической станции. Запуск модуля планируется в 2022 году. А облик звездного работяги должен быть сформирован к марту — апрелю 2020‑го.
В продолжение эксперимента «Испытатель», аналогичные «Федору» роботы полетят на новом пилотируемом корабле «Орел» сначала в автономный полет по орбите вокруг Земли, а затем на МКС. В 2036-2040 годах планируется создание совершенно нового человекоподобного робота — в рамках проекта «Испытатель 2.0». И его отправка на российскую лунную базу. До этого, в 2031-2035 годах, на Луну предлагается запустить своеобразного «кентавра» — робота с человекоподобной верхней частью и шасси вместо ног. Этот проект получил название «Ровер‑АТ».
В 2031-2035 годах предлагается реализовать второй этап работ в рамках проекта «Теледроид»: «Теледроид 2.0» будет предназначен для работы на поверхности окололунной станции.
Некоторые ученые утверждают: в космосе вообще должны работать только автоматы, совершенно незачем рисковать человеком. Но вот один из космонавтов как-то рассказал: «При выходе в открытый космос требовалось что-то заменить. ЦУП говорит: «Возьми ключ на 14″. Я взял, а когда подошел к системе, понял: ключ другой должен быть. Робот выполнил бы мое задание с ключом на 14? Нет. А я выполнил». Получается, роботы могут не все?
Действительно, пока не могут быть созданы роботы с развитым искусственным интеллектом, полностью заменяющие человека во всех ситуациях в космосе. Да и не только там, — говорят специалисты. Тем не менее во многих случаях альтернативы роботам в космосе просто нет. Прежде всего это касается таких опасных и трудоемких вещей, как, например, обслуживание в ближайшем будущем космических ядерных энергоустановок. А строительно-монтажные работы по созданию лунных и напланетных баз? А исследования астероидов и удаленных планет.

Но при этом роботы будут управляться или контролироваться человеком. Поэтому сейчас ведутся активные работы в направлении совершенствования интерфейсов «робот-человек», а также адаптивного автономного поведения роботов, группового взаимодействия роботов между собой.
Конструкторы практически едины во мнении: наиболее универсальными машинами для выполнения сложных операций в околоземном космосе, на Луне и других планетах будут именно человекоподобные аватары.
В любом случае, прежде чем отправиться на орбиту, каждый «механический космонавт» должен пройти самые серьезные испытания: термовакуумные, на вибропрочность и радиационную стойкость, электромагнитную совместимость.
В общем, все как у людей. А может, еще сложнее.

Евгений Дудоров, исполнительный директор НПО «Андроидная техника»:
— В Центре подготовки космонавтов мы представили некий взгляд на развитие технологий космической робототехники на перспективу примерно до 2050 года. Предварительную дорожную карту. Сейчас формируем концепцию, где будет уже подробно описано, что и как мы видим. Но это наш, сугубо инженерный взгляд. Будем подключать ряд компаний, разработчиков по робототехнике и космическим аппаратам, чтобы мы находились в едином тандеме.
До 90 процентов всех операций, которые выполняет космонавт за бортом станции, могут быть выполнены роботом в режиме копирования, управления с пульта или автономно. Первый образец космического транспортно-технологического робота разработан в проекте «Косморобот». Первые образцы антропоморфных роботов космического назначения появятся в двух проектах — «Теледроид» и «Испытатель». Технические задания уже разработаны, подписаны РКК «Энергия» и «ЦНИИмашем». Согласованы с «Роскосмосом».
Естественно, с «Роскосмосом» будем согласовывать и саму концепцию. Скорее всего, специалисты отрасли что-то свое добавят или скорректирует. Почему? Мы видим развитие робототехники, ее применение на околоземной орбите, на Луне и Марсе. Что касается исследования планет, то там много разных задач: связанных с добычей полезных ископаемых, постройкой различных модулей, обслуживанием и т.п. Мы все это должны прописать. Согласовать, каким образом, на чем будет доставляться робототехника. Если говорить конкретно о Луне, то очень важно даже то, в какой части Луны эти устройства будут использоваться.
Скажите, из каких материалов будут делаться роботы для открытого космоса?
— Металлические изделия в основном из алюминия определенных марок. Если это пластиковые изделия — то там, как правило, применяется Ultem. Двигатели мы сейчас свои разработали, и будем как раз сертифицировать для применения в космосе. В номенклатуре будет порядка 3 тысяч различных элементов. Это всевозможные винтики, провода, электронные платы и т.д.
Источник
ТЕХНОЛОГИИ, ИНЖИНИРИНГ, ИННОВАЦИИ
Измеритель диаметра, измеритель эксцентриситета, автоматизация, ГИС, моделирование, разработка программного обеспечения и электроники, БИМ

Космические роботы устремляются к звездам: краткий обзор

Кроме нашего родного праздника 12 апреля — Дня Космонавтики — есть ещё целая Всемирная неделя космоса, которая длится с 4 по 10 октября. В связи с этим, предлагаем краткий обзор использования современных космических роботов. Итак, как гласит Википедия: Ро́бот — автоматическое устройство, созданное по принципам распознавания, удержания и перемещения объектов во вредной и опасной средах, предназначенное для осуществления различного вида операций для производства, которое действует по заранее заложенной программе и получает информацию о положении и состоянии окружающего пространства посредством датчиков.
Робот самостоятельно осуществляет производственные и иные вспомогательные операции, частично или полностью заменяющие труд человека. При этом робот может как иметь связь с оператором получать от него команды, так и действовать автономно, в соответствии с заложенной программой.
Под термин «робот» можно подвести несметное количество устройств. Причём таких, которые вы сами в жизни бы не сочли роботом. Например, банкоматы формально тоже являются «денежными» роботами: они способны автоматически, без участия человека принимать и выдавать деньги, распознавать номинал купюр, сортируя их по своим внутренним кассетам, работать с банковскими картами. Даже промышленные манипуляторы считаются роботами, хотя их функциональность в разы беднее, чем у банкоматов; но зато они двигаются и потому в нашем сознании больше соответствуют гордому званию «робота».
Роботы начали участвовать в освоении космоса раньше человека: автоматическая межпланетная станция (AМС) «Луна-1» была запущена в 1959-м (Гагарин полетел в 1961) и стала первым аппаратом, достигшим второй космической скорости и первым искусственным спутником Солнца. После «Луны-1» по сегодняшний день в космос были запущены десятки АМС, самыми знаменитыми из которых стали «братья» «Вояджеры». Пожалуй, некоторые современные спутники тоже можно считать роботами. Все планетоходы — наш и китайский луноходы, американские марсоходы — вообще чистейшей воды роботы.
Нестареющая классика
Если говорить о привычных нам категориях устройств, то из последнего, наиболее впечатляющего можно вспомнить, как космический аппарат «Розетта» привёз и высадил на комету Чурюмова—Герасименко спускаемый аппарат «Филы»:

Европейскому Космическому Агентству удалось реализовать действительно прорывной проект: впервые в истории успешно посадить на комету искусственный аппарат. «Филы» должен был закрепиться на поверхности ядра с помощью гарпунов, потому что гравитация там слишком слаба, но они не сработали, как и ракетный двигатель, который должен был прижимать аппарат к поверхности. Впрочем, «Филы» всё же сел на комету и провёл ряд исследований, включая химический анализ грунта.
В 2013-м году на Луну высадился китайский луноход «Юйту̒». Собственно, в нём самое примечательное то, что он: а) китайский; б) первый луноход за более чем 40 лет, прошедших с окончания работы советского «Лунохода-2». При запланированных трёх месяцах активной работы «Юйту» перестал двигаться через два. Правда, он не сломался окончательно, а простоял больше двух лет, время от времени выходя на связь. Утверждается, что с помощью «Юйту» удалось обнаружить новый тип лунного грунта.
Что касается российских планетоходов, то «Луноход-2» (1973) стал последним нашим реализованным проектом. Также сегодня существуют планы по созданию спускаемых аппаратов «Луна-25», «Луна-27» и «Луна-28». Первый предназначен для обкатки технологий, второй будет анализировать пробы грунта на месте, а третий должен привезти на Землю лунный лёд.

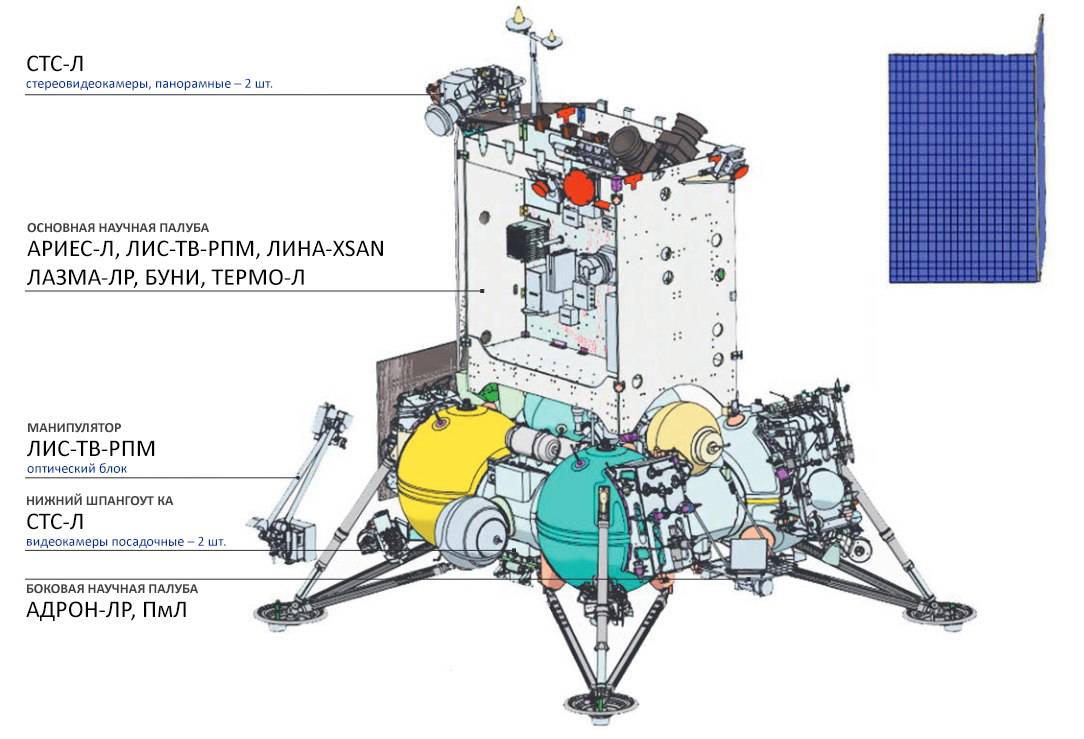
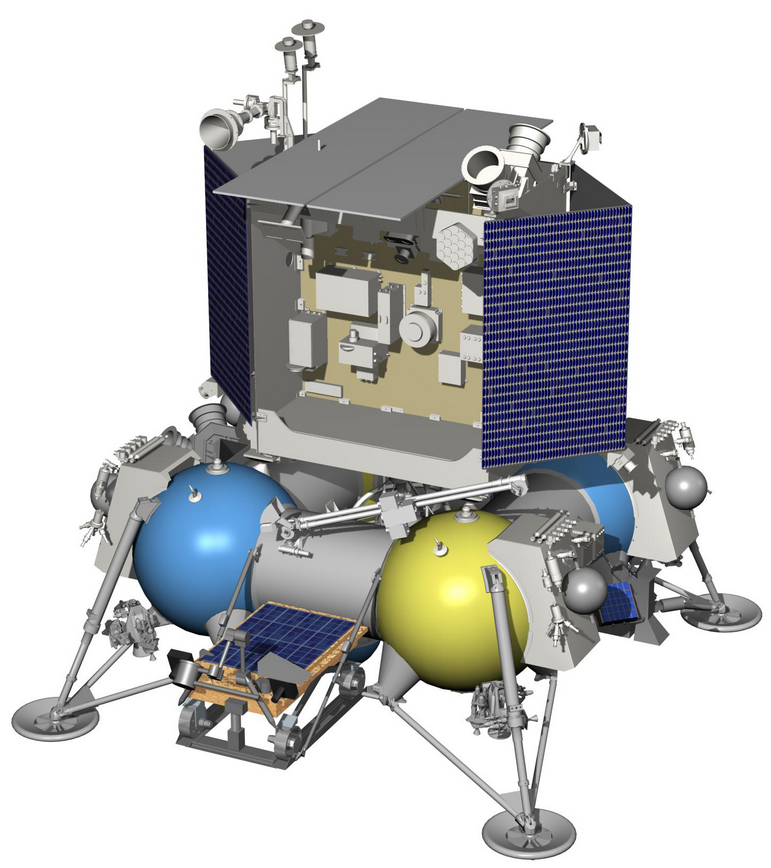
В рамках того же проекта Луну будет исследовать и автоматическая станция «Луна-26» («Луна-Ресурс»):
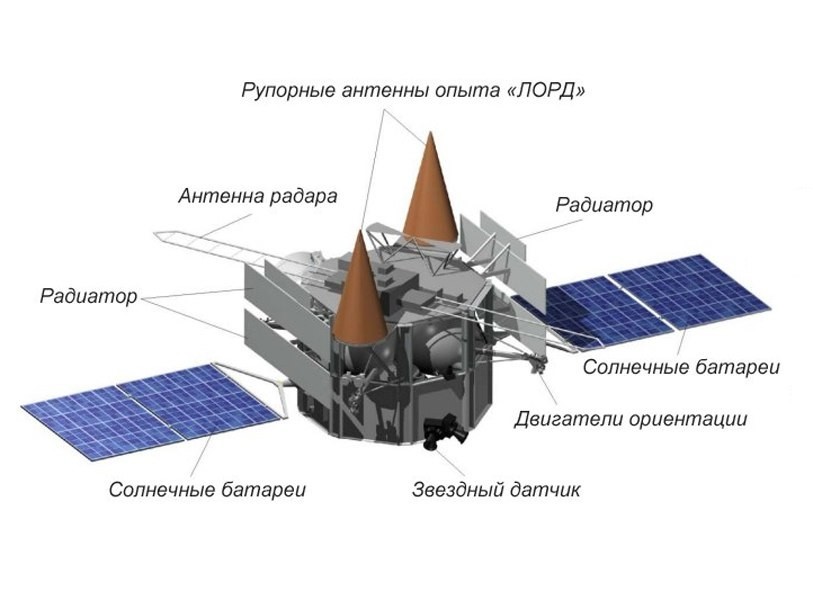
Учитывая постоянные переносы сроков и сокращение расходов на космическую программу неизвестно, полетят ли эти аппараты вообще. Современные исследовательские роботы — АМС, планетоходы — очень дороги в разработке, создании и запуске. Поэтому нередко такие проекты являются плодом международных коопераций. К примеру, программа ExoMars реализуется совместно Европейским Космическим Агентством и Роскосмосом. Первая часть — ExoMars-2016 — оказалась успешной лишь отчасти: спутник-ретранслятор Trace Gas Orbiter успешно вышел на орбиту вокруг Марса, а спускаемый модуль Schiaparelli разбился. В 2020-м планируется запустить вторую очередь программы — отправить на Марс разработанные Роскосмосом поверхностную платформу с марсоходом ExoMars. Будем надеяться, что всё сложится успешно, и планетоход российской конструкции наконец-то начнёт изучение марсианской пустыни.

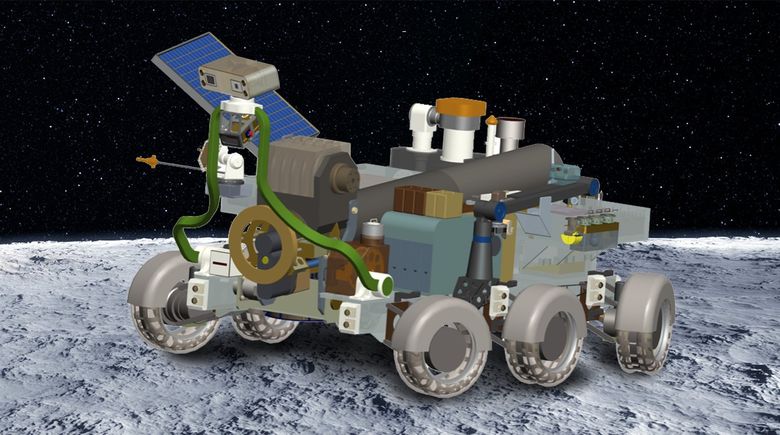
Впрочем, есть надежда, что Роскосмос реализует ещё один интересный проект исследовательского планетохода, который пока носит рабочее название «Робот-геолог». Два года назад сообщалось, что по своей функциональности он будет сравним с Curiosity, который прилетел на Марс ещё в 2012-м, только «Робота-геолога» собираются отправить на Луну. Шестиколёсный луноход будет длиной около 4 м и весить около 1400 кг. Пока это лишь проект, но кто знает…
А ручки-то вот они!
На МКС уже много лет в открытом космосе работают два робота-манипулятора: канадский манипулятор Canadarm2 с «расширением» SPDM (”Dextre”), которым можно управлять как с борта станции, так и с Земли:

Источник