Альтернативная энергия Альтернативная энергетика, возобновляемые источники энергии, энергетические ресурсы планеты.

Солнечная автономия в глубинке. 5 часть
Существуют некоторые хитрости, позволяющие, немного модифицировав основную систему, получить больше энергии от солнца. Первая из них – следить за солнцем, а вторая – за точкой максимальной мощности солнечных батарей.
Слежение за солнцем осуществляется с помощью солнечного трекера, с которого я и начну эту статью. Следующее видео демонстирует принцип действия трекера для солнечных панелей.
После монтажа солнечного трекера выработка энергии увеличится в 1,6 раза благодаря более длительному воздействию солнца на панели, а также оптимизации угла установки солнечных панелей по отношению к солнцу. Стоимость готового солнечного трекера составит около 52 000 рублей. Поскольку он сможет удержать всего пару панелей с общей мощностью до 600Вт, окупится такая система нескоро. Но сделать такое устройство можно и самостоятельно, причем самодельные трекеры довольно популярны.
При слежении за солнцем есть следующие главные задачи:
1. Создание крепкой платформы, способной выдержать и вес самих панелей, и порывы ветра.
2. Создание механики поворота тяжелой платформы с высокой парусностью.
3. Разработка логики управления механикой для слежения за солнцем.
Итак, пункт первый. Массивы батарей лучше разместить кратно необходимому напряжению, при этом они не должны затенять друг друга.

Для трекера потребуются крепкое железо и мощный фундамент. Для управления поворотной платформой оптимально подойдут актуаторы. На следующем снимке можно рассмотреть механику управления.

Такой трекер позволит контролировать положение солнечных панелей сразу в двух плоскостях. Но при желании можно настроить управление только по горизонтали, а по вертикали изменять угол пару два раза в год (осенью и весной).
Создавая логику всей системы можно выбрать один из нескольких вариантов:
1. Следить за максимально яркой точкой.
2. Установить наклон и поворот по таймеру (для каждого дня всегда известны время восхода и захода солнца).
3. Комбинированный вариант, предусматривающий постоянство угла поворота и поиск максимальной яркости.
Для первого способа есть два решения: соорудить трекер самостоятельно или купить готовый китайский, стоимостью около 100 долларов.


Но поскольку сделать такое устройство довольно несложно любому, кто разбирается в принципах работы контроллеров, многие предпочитают сделать все самостоятельно, при этом самодельный трекер обойдется в 10 раз дешевле.
Подробности изготовления солнечного трекера можно узнать на профильном форуме, где оптимальные конструкции уже вычислены и подобрано наилучшее оборудование. Слежение за МРРТ (точка максимальной мощности солнечных батарей) Для этой цели существует два типа солнечных контроллеров. Контроллер МРРТ (Maximum Power Point Tracking) следит за солнцем с другой позиции системы. Для обьяснения привожу следующий график.

Как видно из графика, максимум снимаемой мощности будет получен в точке максимальной мощности, которая непременно окажется на зеленой линии. Это невозможно для обычного ШИМ контроллера. Используя МРРТ контроллер можно также подключить последовательно соединенные солнечные панели. Такой способ позволит ощутимо снизить потери энергии в процессе транспортировки от солнечных батарей до аккумуляторов. Экономически целесообразно устанавливать МРРТ контроллеры при мощности СП, превышающей 300-400 Вт. Вполне обоснованной будет покупка солнечного контроллера «с запасом», если только вы не создаете мощную энергосистему, которая перекроет потребности дома с избытком. Последовательно наращивая число солнечных батарей, я получил мощность 800 Вт, чего вполне достаточно для загородного дачного домика летом.
В моем примере от энергосистемы в среднем ожидается по 4 кВт*ч электрической энергии в день с апреля по август. Такого количества энергии вполне достаточно для комфорта семьи из 4 человек при условии отказа от пользования электроплитой и микроволновой печью. Мощным потребителем энергии является бойлер для подогрева воды. Для 80 литрового бойлера в частном доме потребуется как раз приблизительно 4,5кВт*ч энергии. Таким образом, создаваемая автономная система окупится хотя бы при нагреве воды.
Предыдущая статья была посвящена гибридному инвертору, позволяющему забирать энергию преимущественно от солнечных батарей, получая от сети только недостающее количество. Компания МикроАрт уже наладила выпуск МРРТ-контроллеров, которые могут быть связаны с инверторами этой же фирмы по общей шине. Поскольку гибридный инвертор МикроАрт я уже установил, этот вариант для меня особенно удобен.
Главным достоинством этого контроллера для меня стала возможность подкачки нужного количества электричества, чтобы не заимствовать энергию от аккумулятора, снижая его ресурс. Самым популярным и при этом оптимальным по соотношению напряжение/ток является Контроллер ECO Энергия MPPT Pro 200/100. Он способен поддерживать входное напряжение до 200 В и выходной ток до 100 А. Мои аккумуляторы собраны на 24 В (напряжение аккумуляторов 12/24/48/96 В), так что максимальная мощность от контроллера составит 2400 Вт, таким образом я получаю двукратный запас при наращивании солнечных батарей. Максимальная мощность контроллера – 11 кВт при 110 В на аккумуляторах (буферное напряжение).
Связь контроллера с гибридным инвертором МАП SIN Энергия Pro HYBRID v.1 24В поддерживается по шине 12С. При этом возможно мгновенное добавление мощности в случае, когда инвертор выдает информацию о повышенном потреблении энергии. Поскольку оба устройства от одного производителя – понадобилось лишь включить шнурки в нужные разьемы устройств и активировать нужные параметры.
Продолжая исследовать возможности контроллера, я обнаружил три реле, которые можно запрограммировать. Например, при солнечной погоде, если дом не потребляет электроэнергию, можно подогреть дополнительный бойлер или бассейн. Другой вариант — погода пасмурная и напряжение аккумуляторов снижено до критического уровня, инвертор может вообще отключиться, а энергия потребляется. В таком случае возможен запуск отдельного бензо/дизель генератора, для чего достаточно просто замкнуть реле. При этом в генераторе должен быть сухой контакт запуска или же отдельная система автоматического пуска – САП (другое название – АВР, Автоматический Ввод Резерва). Генератор у меня простой китайский, но стартер имеется. Поинтересовавшись автоматизацией его запуска, и выяснив, что МикроАрт уже давно выпускает собственную автоматику, я был очень этим обрадован.
Вернемся к монтажу контроллера. Здесь все стандартно: сначала нужно подключить клеммы аккумулятора, потом клеммы солнечных батарей, после чего настраиваются параметры. При подключении внешнего датчика тока можно обнаружить мощность, потребляемую инвертором в режиме реального времени.
На следующем фото можно увидеть, как работает инвертор в гибридном режиме (получая часть энергии – от сети, основную же часть – от солнечных батарей).

Чтобы продемонстрировать работу солнечного контроллера с любым другим инвертором от стороннего производителя, контроллер специально подключается с помощью внешнего датчика тока.
Реальные характеристики контроллера полностью соответствуют заявленным. Он действительно подкачивает энергию, даже при подключении к «чужому» инвертору через датчик тока. Гибридный инвертор, как и планировалось, качает в сеть энергию солнца (на фотографии видно, что100 Вт, а это половина из 200 Вт потребляемых, поступает от солнечных батарей. То есть, минимальные 100 Вт будут забираться контроллером из сети, а недостающие – поступать от солнца. Такова особенность устройства). Таким образом, комплект начал окупать себя уже с момента подключения. А начиная с мая можно рассчитывать и на полное покрытие энергетических нужд солнечными батареями.
Последующая статья станет заключительной, в ней будут сравнены три солнечные контроллера, которые у меня уже имеются.
Источник
Устройство слежения за солнцем
Как известно, КПД солнечной панели максимально при попадании на нее прямых солнечных лучей. Но т.к. солнце постоянно движется по горизонту, то КПД солнечных батарей сильно падает, когда солнечные лучи падают на панель под углом. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем и автоматически поворачивающие солнечную панель для попадания прямых лучей.
В данной статье представлена схема устройства слежения за солнцем или по другому трэкер (Solar Tracker).
Схема трэкера проста, компактна и вы легко сможете собрать ее своими руками. Для определения позиции солнца, используются два фоторезистора. Мотор включен по схеме H-моста (H-bridge), который позволяет коммутировать ток до 500 мА при напряжении питания 6-15В. В темноте, устройство также работоспособно и будет поворачивать моторчик на наиболее яркий источник света.
Принципиальная схема устройства слежения за солнцем
Как видно на рисунке ниже, схема проста до безобразия и содержит микросхему операционного усилителя LM1458 (К140УД20), транзисторы BD139 (КТ815Г, КТ961А) и BD140 (КТ814Г,КТ626В), фоторезисторы, диоды 1N4004 (КД243Г), резисторы и подстроечные резисторы.
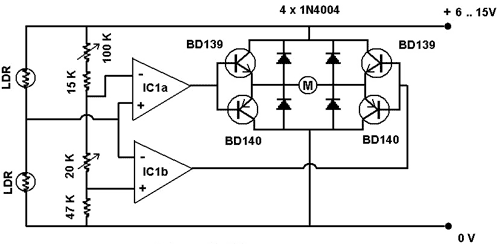
Из схемы видно, что мотор М приводится в движение при разных значениях на выходах ОУ IC1a и IC1b. Таблица истинности:
| Выход IC1a | Выход IC1b | Состояние мотора |
| Низк. | Низк. | |
| Низк. | Выс. | Вперед * |
| Выс. | Выс. | Остановлен |
| Выс. | Низк. | Назад * |
* или наоборот, зависит от подключения мотора
Транзисторы в схеме работают в паре, по диагонали, коммутируя +Ve или -Ve к мотору, и заставляя его вращаться вперед или назад.
Во время остановки мотора, он продолжает вращаться, т.к. присутствует вращающийся момент. Вследствие этого, мотор какое-то время генерирует мощность, которая может вывести транзисторы из строя. Для защиты транзисторов от противоЭДС в схеме моста используется 4 диода.
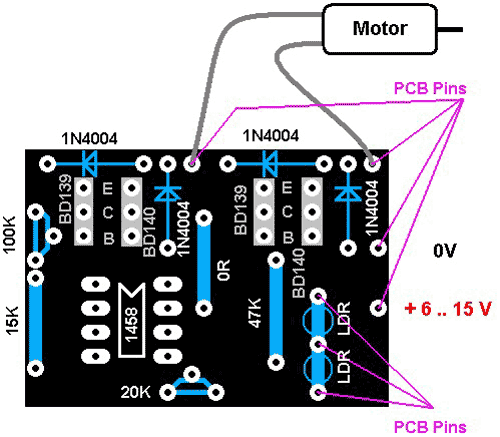
Входной каскад состоит из двух ОУ (IC1) и фоторезисторов LDR и LDR’. Если количество света, попадающее на них одинаково, то сопротивления фоторезисторов также равны. Следовательно, если напряжение питания 12В, то в месте соединения фоторезисторов LDR LDR’ будет напряжение в 6В. Если количество света попадающего на один фоторезистор будет больше, чем на другом фоторезисторе, то напряжение будет изменяться.
Ограничения (лимиты) от +V до 0V устанавливаются четырьмя последовательно соединенными резисторами и подстраивается 2-мя подстроечными резисторами. Если напряжение выйдет за пределы этих ограничений, то ОУ запустит мотор и он постоянно будет вращаться.
Подстроечный резистор 20K регулируют чувствительность, т.е. диапазон между лимитами. Подстроечник 100К регулирует то, насколько лимиты будут симметричны относительно +V/2 (точка баланса).
Настройка схемы:
1. Проверьте напряжение источника питания схемы
2. Подключите двигатель пост. тока
3. Установите фоторезисторы рядом, чтобы на них попадало одинаковое количество света.
4. Полностью выкрутите оба подстроечный резистора против часовой стрелки
5. Подайте питание на схему. Моторчик закрутиться
6. Вращайте подстроечник 100К по часовой стрелке до тех пор, пока он не остановится. Отметьте эту позицию.
7. Продолжайте вращать подстроечник 100К по часовой стрелке до тех пор, пока мотор не начнет вращаться в другую сторону. Отметьте эту позицию.
8. Разделите угол между двумя позициями пополам и установите там подстроечник (это будет точка баланса).
9. Теперь, вращайте подстроечник 20К по часовой стрелке до тех пор, пока мотор не начнет дергаться
10. Немного верните положение подстроечника назад (против часовой стрелки), чтобы мотор остановился (данный подстроечник отвечает за чувствительность)
11. Проверьте корректность работы схемы, поочередно заслоняя от света один и второй фоторезисторы.
Источник
Самонаводящаяся солнечная панель.
Автор: Oto. Опубликовано в Автоматика в быту
 Как известно, наибольшее КПД солнечной панели при попадании на нее максимально прямых солнечных лучей. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем, и автоматически поворачивающие солнечную панель для попадания прямых лучей.
Как известно, наибольшее КПД солнечной панели при попадании на нее максимально прямых солнечных лучей. Чтобы повысить КПД солнечных панелей, применяются системы следящие за солнцем, и автоматически поворачивающие солнечную панель для попадания прямых лучей.
Хотя и существуют системы слежения за солнцем, которыми можно оснастить солнечную батарею, эти «солнечные трекеры» обходятся не дешево. К тому же, автоматические системы ориентации усложняют процесс монтажа новых панелей, и непросто их интегрировать в уже установленные солнечные массивы панелей.
Традиционная установка солнечных модулей на крышах, обычно фиксируются «намертво» в определенном положении. Монтаж такого крепления проще, но он не позволяет использовать потенциал фотоэлементов солнечной панели в полной мере, так как солнце, двигаясь по небу в течение дня, «напрямую» с панелями взаимодействует лишь некоторую часть времени.
В данной статье, представлена любительская схема и программа для самонаводящейся солнечной панели, или другими словами трекер слежения за солнцем (Solar Tracker).
Такую схему трекера вы сможете собрать своими руками, к тому же это весьма интересно сделать такую автоматику своими руками, здесь очень много места для индивидуального творчества.
Если собрать эту схему управления, получим солнечную панель, автоматически поворачиваемую вслед за солнцем, увеличивая КПД этой солнечной панели.
Для начала, наверное, стоит рассказать, что в этой статье понимается под солнечным трекером, вкратце это устройство состоит из двух частей
- Механическая часть с электроприводами
- Электрическая схема с программой управления.
Слаженное взаимодействие этих частей, позволяет панели в течение солнечного дня собирать достаточное количество света, меняя своё положение вслед за солнцем.
При создании этого трекера слежения за солнцем, процесс изготовления можно разделить на условные четыре этапа:
1) сборка механической части механизма поворота и наклона для солнечных панелей, 2) изготовление электроприводов и их крепление, 3) сборка и крепление светочувствительных элементов к собранной конструкции, 4) разработка электрической схемы и создания к ней программы управления.
Механическая часть поворотного механизма с электроприводами.
В идеале, нужно создать крепкую платформу, способную выдержать вес поворотного механизма и вес самих панелей, а также порывы ветра.
Механика поворотной платформы должна быть крепкая, тяжелая и с высокой устойчивостью парусности.
Солнечные панели расположить так, чтобы их ничего не затеняло.
На практике разнообразие поворотных механизмов велико, на многие из них можно найти описание в интернете. Упрощено говоря, варианты эти по «мощности» от нескольких килограмм до нескольких тонн.
Механизм, описанный в этой статье, сделан для одной солнечной панели весом 12кг, с помощью электроприводов на основе стеклоподъемников (по факту получается червячно-винтовой привод, он очень мощный и не требует удержания положения СП двигателем).
Да и вообще, для небольших самоделок, приводы на основе механизмов для стеклоподъемников, самый бюджетный вариант для подобных самоделок. Например, в онлайн — объявлениях на OLX , по цене 5-10 $ за моторчики в сборе, и их там можно найти неимоверное количество, и это будет очень выгодная покупка за такие деньги.
Видео, в начальной стадии сборки механизма поворота и наклона солнечной панели, в данной конструкции угол разворота 160 ° .
Кому нужен больший механизм, нужно просто масштабировать элементы поворотного устройства, схема с программой управления не имеет никаких отличий для разных видов поворотных механизмов.
Фото панели и механизма в эксплуатации.
 |  |  |
| Лето | Лето-Осень | Осень |
Механизм трекера позволит контролировать положение солнечных панелей сразу в двух плоскостях.
Привода изменения угла наклона и поворота включены по схеме H-моста (H-bridge).
Схемотехническая и программная часть.

Рис. №1 Электрическая схема, основные детали — графический дисплей Nokia5110, микроконтроллер ATmega328, 8-битный расширитель ввода-вывода PCF8574t, однополярные датчики холла A3144, операционный усилитель «Rail-to-Rail» MCP602 , пульт и приемник Д/У.
Датчиком для определения позиции солнца, используются четыре солнечных фотоэлемента.
Общий алгоритм работы заключается в обработке данных с фотоэлементов датчика при помощи АЦП.

Имеем 4 фотоэлемента, то есть 4 показания, по ним находим среднее показание по горизонтали — ось Х, аналогично по вертикали — ось У.
Важно чтобы закрепленные фотоэлементы, имели разделение света для каждого из четырёх элементов.
Если разница по оси Х между левым и правым фотоэлементом «не уравновешены», то осуществляем поворот в сторону с большим значением. Аналогично для вертикали, по оси У.
Индивидуальными настройками в меню пользователя можно задавать нужную чувствительность срабатывания и период движения панели.
1.1 ) Основной режим отслеживания.
Поворот и наклон панелей производится с помощью приводов М1 – М2.
Принцип такой, с помощью электромотора М1, поддерживается баланс освещенности солнечными лучами фотоэлементов x0, x1 . Ограничение поворота (движения) по оси Х, датчики d_X0, d_X1.
С помощью электромотора М2, поддерживается баланс освещенности солнечными лучами фотоэлементов у2, у3 . Ограничение поворота (движения) по оси У, датчики d_Y2, d_Y3.
Очередность и расположение датчиков должно быть как на рис.№3

1.1.2) Включение двигателей М1 – М2 управляется программно и раздельно друг от друга, два привода никогда не включаются одновременно.
Этим достигается уменьшение токовой нагрузки на блок питания двумя двигателями одновременно, это исключение одновременного включение двигателей по оси Х и У предусмотрено программно. Контроль превышения потребляемой мощности по встроенному амперметру( см.п. 3.6.1) . Программная настройка PWM макс. мощности для привода каждой из осей ( см.п. 3.6.2) .
1.1.3) Также в программе предусмотрено, что один привод по оси Х или У не может работать более чем 10 минут без выключения, если при работе привода будет превышено 10-ти минутное время беспрерывной работы, программный таймер отключит этот двигатель на 10 минут паузы. (на экран будет выведено сообщение «превышен лимит движения Х_У», также каждые 5 секунд на 1 секунду будет включаться звуковой сигнал bz_1 (порт РВ0 )).
1.1.4) В программе, предусмотрена возможность работы трекера только по одной оси Х или У, эти варианты возможны на выбор пользователя см.п.3.3.5,
2.1 Пульт дистанционный – команды управления.

В режиме основного отслеживания, четыре команды управления, кнопки A,B,C и D соответственно.
2.1.1) Кнопка «В», условно это положение можно называть как «О» или положение восход ** .
Независимо от данных датчиков освещенности Х-У, трекер поворачивает панель в крайнюю точку оси Х , где происходит сработка концевого датчика d_X0 (изменении положения по оси У, при этой команде не происходит).
Данное направление панели соответствует утреннему восходу солнца.
2.1.2) Кнопка « D », положение при непогоде ** .
Данная команда устанавливает панель в крайние положения, выбранным пользователем в меню.
( В меню выбора следует указать, в какое положение по датчикам d_X0, d_X1, или d_Y2, d_Y3 произойти установка панели, значения датчикам присваивается 0 или 1 ( 0 = не поворачивать к датчику, 1= поворачивать панель до срабатывания датчика ).
Например: при команде №2.1.2 установки значений d_X0=0, d_X1=1 и d_Y2=0, d_Y3=1 , панель примет крайние положения относительно датчиков d_X1 и d_Y3 по оси Х-У.
Или, еще вариант, при установленных значениях d_X0=0, d_X1=1 и d_Y2=0, d_Y3=0 , панель примет крайние положение относительно датчика d_X1 по оси Х. По оси У панель смещена не будет так как мы задали значения датчикам d_Y2=0, d_Y3=0.
2.1.3) Кнопка «А». Автоматическое слежение.
При данной команде отменяются действия команд 2.1.1, 2.1.2 и 2.1.4, работа программы переводится в основной режим отслеживания по п.1.1.
2.1.4) Кнопка «С», » Стоп » (остановка приводов).
Команда останавливает движение приводов по осям Х-У. Параметр сохраняется в .еер МК, сброс этой команды возможен только командой см.п. 2.1.3
** ограничение удержания по времени в положении достигнутых от команд 2.1.1, 2.1.2 , 12 часов (настраивается в меню №1). Также следует учесть, команды 2.1.1, 2.1.2 не имеют фиксации состояния в .еер МК, или отключить эту команду см.п. 2.1.3.
2.2) Так же с помощью пульта Д/У можно производить ручной поворот и наклон панели по оси Х-У, с помощью электроприводов М1 – М2.
Для этого, когда трекер находится в режиме основного отслеживания, на пульте Д/У зажать одновременно кнопки В и С, программа перейдет в режим ручного управления М1 – М2, см. меню п.3.1.3.
В этом режиме при одноразовом нажатии на кнопки A,B,C или D , электроприводы панели будут поворачивать панель в нужное вам положение (движение будет производиться не дальше, чем это допускают датчики d_X0, d_X1, или d_Y2, d_Y3).
Выход из режима ручного управления Д/У, осуществляется одновременным зажатием двух кнопок A и D .
Демонстрация работы пульта Д/У
2.3 ) Кнопки управления на панели прибора Кн1, Кн2, Кн3.
2.3.1) В режиме основного отслеживания (см.п.1.1).
При удержании Кн2 (более 3х сек.) происходит вход в меню пользовательских настроек (см.п.3).
Кратковременным нажатием, Кн1 вызывает для просмотра статистика утренних или вечерних парковок (работает, если соблюдения условия п.3.4.4).
Кратковременное нажатие Кн3 , производит ручной сброс сработавших программных защит таких как см.п.1.1.3 и 3.6.1.
Длительное удержание Кн3 разово активирует (см.п.1.1) подстройку СП на наиболее освещенное направление (сбрасываются условия п.3.2.4).
2.3.2) Кнопки Кн1, Кн2, Кн3, в меню пользовательских настроек.
Кнопка Кн2 , короткое нажатие – движение по пунктам и параметрам в меню настроек, длинное нажатие – возврат к предыдущему пункта меню, вплоть до основного режима п.1.1
Кн1 и Кн3 изменение параметров настроек в меню пользователя.
3 . Пункты меню.
Основные свойства программы в большей части отображены в пунктах меню, именно настройка некоторых пунктов меню, позволит каждому пользователю приспособить эту программу к своим условиям.

3.1.1 ) Пункт настройки, для кнопки Д/У которую я условно называю «непогода»
С помощью настройки значений 3.1.1, пользователь может вручную кнопкой Д/У установить СП (солнечную панель) согласно расположения датчиков (см. рис.№3) , в наиболее защищенное положение при неблагоприятных погодных условиях.
Так же эта настройка будет использована автоматически, по превышению показаний тахометра (см.п.3.6.3), панель установится по датчикам в положение «непогода».
3.1.2) Настройка времени ручного удержания СП в заданном положении при управлении пультом Д/У (см. описание команд Д/У 2.1.1 и 2.1.2 ).
3.1.3) Пункт перехода в меню ручного дистанционного управления, в данном меню управление кнопками Д/У, напоминает управление джойстика в четыре направления (подробней смотри видео). В режим ручного управления, можно войти и дистанционно см.п.2.2, одновременно нажав на пульте Д/У кнопки С + В — вход в «режим джойстика» , A + D – выход из ручного режима наклона и поворота, (возврат к автоматическому слежению).
3.2.1) Отображение показаний по каждому элементу датчиков (см. рис1 элементы x0, x1, у2, у3) , показания используются только для изучения свойств , баланса освещенности датчика направленного на солнце, другого назначения эта информация не имеет (показометр).
3.2.2) Программная установка порога минимальной освещенности, параметр имеет значения только для функции «вечерняя» или «утренняя» парковка (взаимосвязь с пунктом 3.3.1. и 3.3.2).
3.2.3) Программная установка общего порога освещенности для фотоэлементов x0, x1, у2, у3, когда какой либо из фотоэлементов x0, x1, у2, у3, будет освещен выше установленного порога, программа получает разрешение приступить к автоматическому режиму основного отслеживания п.1.1.
3.2.4) Движение панели можно «разбить» на временные циклы, после того как панель устанавливается в баланс наводки на солнце, начинается отсчет паузы установленной в этом пункте от 1 до 99 минут, таким образом получается как бы «шаговый» режим движения слежения за солнцем.
3.3.1 ) Варианты вечерней и утренней парковки.
Вариант «0» парковки нет.
Вариант №1 парковка может быть поэтапная, вечером к одному из датчиков d_X0, d_X1, d_Y2, d_Y3, утром к любому другому, off – парковки нет.
Вариант №2 , когда парковка будет произведена к двум из датчиков d_X0, d_X1, d_Y2, d_Y3, утром или вечером за одно действие, off – парковки к датчику нет.
3.3.2) Выбор датчиков куда припаркуется СП, по вариантам п.3.3.1 или если выбрано off , автоматической парковки не будет.
3.3.3) Пользователь сам выбирает наиболее выгодный фотоэлемент, участвующий в автоматическом определении времени парковки, например в моем использовании это у2 (тут более важно, выбрать правильный порог освещенности в пункте 3.2.2).
3.3.4) Стабилизация слежения установки СП на солнце.
«ДА» программная стабилизация включена. Если выбор «НЕТ», то отключена.
3.3.5) Возможность программно отключить один из приводов М1 — М2 , по оси Х или У, данный вариант может быть использован тем, кто использует слежение трекером например только по оси Х, это может быть в том случае когда кто то считает нецелесообразным настройку положения по оси У.
3.4.1 ) Регистрация пульта управления , для работы с данной программой трекера, в данных строках отображается код приходящий код от брелков Д/У.
3.4.2) В данных строках, отображается приходящий код от брелков Д/У записанный в память .еер МК.
3.4.3) По нажатию Кн1, код из буфера обмена п.3.4.1 , запишется в .еер МК п.3.4.2 . Подробней смотрите видео.
3.4.4) Отображение адресов на шине i2c , для pcf8574 это должен быть строго 0x40 , для ds3231 или ds1307 будет 0xD0 . Установка часов реального времени, в данном проекте вовсе необязательна, это все использовалось в чисто экспериментальных целях, для фиксации времени парковки, кому это интересно, можете просматривать эту статистику, при установленной микросхеме ds3231 или ds1307 , в основном экране нажать Кн1 на экран будет выведена информация о времени последних 24 парковок. Установка или отсутствие ds3231 или ds1307 на работу основной программы слежения никак не влияет.
3.5.1 ) В зависимости от типа индикатора, может понадобиться изменить инверсию подсветки.
3.5.2) Подстройка контрастности дисплея.
3.5.3) Установка времени для автоматического выхода из меню настроек, в главный экран, такой выход из меню произойдет когда в течение выбранного времени, не будет нажата ни одна из кнопок Кн1, Кн2, Кн3..
3.5.4) Установка времени для ds3231 или ds1307 (см. п.3.4.4).
3.6.1 ) Установка порога амперметра, в случае непредвиденного, повышения потребления мощности приводами пол. оси Х-У. Встроенный амперметр, будет делать отключение команд включения приводов, с дальнейшей попыткой, через 1 минуту возобновить работу (каждые 5 секунд на 1 секунду будет включаться звуковой сигнал bz_1 (порт РВ0).)
3.6.2) Настройка PWM макс. мощности для привода каждой из осей Х и У.
3.6.3) Установка количества оборотов для тахометра, в случае превышения оборотов от установленного, панель станет в положение согласно установок пункта меню №3.1.1, на время 10 минут, далее последует авто возврат, в автоматическое отслеживание (отсчет авто возврата можно контролировать на главном экране, появится строка «Ветро ЗАЩИТА» с отчетом времени).
3.6.4) Перезагрузка МК, данный параметр не имеет большой ценности в этом меню, просто при отладке сторожевого таймера это использовалось, в общем пусть пока будет (и если активны условия п.3.4.4, по этой команде происходит обнуление статистики утренних или вечерних парковок см.п.2.3.1).
3.6.5) При первой подаче питания на МК небольшое придержание работы электроприводов, кому то это может оказаться полезной вещью кому то бесполезной, и те и другие могут настроить этот параметр на свой выбор…
3.6.6) Практически аналогично сказанному, в пункте 3.6.5 , время работы реле «самоподпитки», индивидуальная настройка для этого реле.
4. Подключение электроприводов – драйвера для электроприводов.
На принципиальной схеме рис.№2 показан наиболее понятный принцип подключения электроприводов М1 — М2 с помощью идеального решения для такой схемы, драйвера L298n .
L298n – сдвоенный Н-мостовой драйвер, для управления двунаправленными нагрузками, с токами до 2А и напряжениями от 4,5 до 46 вольт. Разработан для управления реле, соленоидами, двигателями постоянного тока и шаговыми двигателями.
В L298 существует разделение электропитания для логической схемы и для нагрузки, что позволяет подключить нагрузку с меньшим или большим напряжением питания, чем у микросхемы, а также уменьшает помехи. Но все это идеально, пока нагрузка от М1 — М2 не будет превышать 2.5 ампера.
В моем же случае используемые электроприводы от стеклоподъемников, на практике максимально до 6 ампер. Можно конечно на выход L298 добавить более мощные ключи на полевых транзисторах, но это так сказать на любителя, по цене и качеству будет проигрыш по сравнению с готовым вариантом драйвера, например BTS7960, нагрузка по постоянному току до 40A.
Когда ко мне приехали эти модули BTS7960, оказалось что логика управления, у него чуть отличается от L298, поэтому чтобы не плодить прошивки для схемы с разными драйверами, пришлось BTS7960 подключить через несложный адаптер в виде такой схемы рис. №5.

В общем, по финалу, электроприводами М1 — М2 можно управлять, в виде таких вариантов схемных решений:
| №1 L298n | №2 BTS7960 . | №3 реле |
 |  |  |
 |  |  |
Симуляция работы схемы в протеусе

FUSE: Программа работает на тактовой частоте 16 МГц, с внешним кварцем.

Далее, уже собранная электрическая схема на печатной плате в «железе», фото готовой печатной платы прилагаю.

Рисунок печатной платы.

После монтажа солнечного трекера выработка энергии увеличится, благодаря более длительному воздействию солнца на панели, а также за счет оптимизации угла установки солнечных панелей по отношению к солнцу.
Поэтому, такие солнечные трекеры довольно популярны, нужно лишь определиться, соорудить трекер самостоятельно, или купить готовый китайский, кстати, стоимость около 100 долларов, это гораздо больше себестоимости самих радиодеталей примененных в нем.
Сделать описанное в статье устройство может любой, кто разбирается в принципах работы электрических схем, и имеет практику работы с микроконтроллерами, для тех, кто предпочитает сделать все самостоятельно, самодельный трекер обойдется раз в 10 дешевле покупного, это точно.
Шильда с характеристиками солнечной панели используемой в данном устройстве слежения.
Небольшое видео, работы солнечного трекера в течение суток.
Источник