Средство передвижения по луне
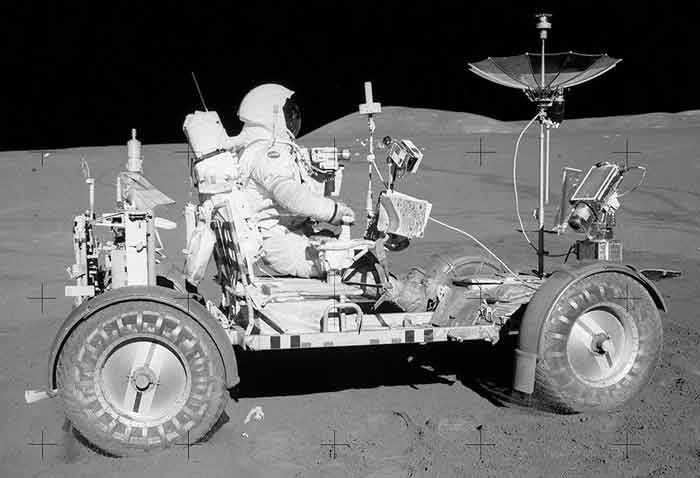
Луноход «Аполлон-15» 30 июля 1971.
За рулем командир Дейвид Скотт (Scott David Randolph) (NASA)
источник Википедия

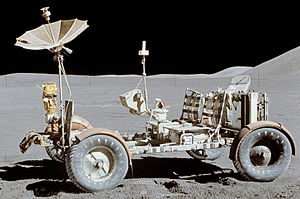
На снимке: астронавт Юджин A. Сернан (Eugene A. Cernan), командир «Аполлона-17», делает преварительный контроль Лунного Передвижного Транспортного средства (LRV) во время первого выхода в районе посадки лунного модуля на Taurus-Littrow. Луноход (LRV) еще не загружен полностью.
Оборудование, позже загруженное на LRV, включало системы управления телевизионным и кино- оборудованием, лунное коммуникационное реле (12 на схеме вверху), остронаправленную антенну
(1 на сх. вверху), малонаправленную антенну (3 на сх. вверху), в кормовой части поддон для инструмента, лунные инструменты и научный приборы.
Эта фотография была сделана ученым-астронавтом Харрисоном Шмиттом (Harrison H. Schmitt), пилотом модуля лунный. Гора справа — оконечность Южного Горного массива (South Massif). <Специальность Хариссона Шмитта — геолог].
В то время как астронавты Сернан и Шмитт, спустились в лунном модуле (LM) на поверхность для исследования Луны, с позывными «Challenger» («Претендент»), астронавт Рональда Эванс (Ronald E. Evans), пилот командного модуля (CSM), находился на лунной орбите с позывным «America» («Америка»).
источник Википедия, свободный перевод А. Коваль
Р.Льюис (США) из книги Гэтланд К. (консультант и основной автор), Шарп М., Скиннер Д., Вик Ч., Пирард Т., Дулинг Д., Шнапф А., Джонсон Н., Вудс Д., Льюис Р., Белицкий Б., Паркинсон Р., Бонд А. «Иллюстрированная энциклопедия. Космическая техника». Перевод с английского канд.техн.наук С.Ф.Костромина и д-ра техн.наук В.В.Савичева под редакцией д-ра техн.наук, проф. С.Д.Гришина.
(The Illustrated Encyclopedia of Space Technology A comprehensive history of space exploration Kenneth Gatland Consultant and Principal Author. Salamander book PUBLISHED BY SALAMANDER BOOKS LIMITED LONDON 1982). Перевод на русский язык, с изменениями и дополнениями, «Мир», 1986 Эпизоды космонавтики
Источник
Средства перемещения в лунном мире
Луноходы стали первой разновидностью лунного транспорта. Советские луноходы представляют собой полностью автоматизированные средства перемещения, управляемые с Земли. У американских луноходов водителями были космонавты. В дальнейшем в ходе освоения Луны предполагается создать самые разнообразные средства перемещения, способные действовать в условиях полного вакуума, ослабленной тяжести и резких колебаний температуры. Рассмотрим некоторые из опубликованных зарубежных проектов.
Прежде всего, подчеркнем, что и в дальнейшем предполагается использовать в лунном мире движущиеся аппараты двух типов: автоматические самодвижущиеся лаборатории, оснащенные исследовательской аппаратурой для исследования Луны, и собственно транспортные сродства, предназначенные для перемещений по Луне.
Аппараты первого типа будут постепенно совершенствоваться, насыщаясь новой аппаратурой для взятия проб и исследования лунного грунта, телевизионного обзора; телескопами, работающими во всех диапазонах от гамма-лучей до радиоволн; приемниками космических лучей, фотометрами, магнитометрами и, словом, всем тем, что даст максимальную информацию о неизвестных частях лунного мира. В дальнейшем на самоходные автоматы возложат, вероятно, перевозки разного вида грузов и это положит начало автоматическому лунному транспорту.
Из управляемых космонавтами лунных транспортных средств прежде всего следует отметить лунные летательные аппараты (ЛЛА) с радиусом действия и десятки и сотни километров. Работая на ЖРД, они помогут космонавтам вести разведку местностей, далеких от района посадки космических кораблей. Некоторые из ЛЛА, вероятно, будут иметь базой искусственные спутники Луны.
Предполагается, что технические возможности ЛЛА обеспечат им полет по баллистической траектории, «зависание» над лунной поверхностью, а главное, многократное использование, подобно земным самолетам. Кстати сказать, для лунных нужд уже сегодня разрабатываются методы навигации в обстановке лунного мира. На Луне штурман явится таким же незаменимым членом летного экипажа, как и в земной авиации.
Интересен американский проект самодвижущегося транспортного аппарата для перевозки разных грузов по лунной поверхности. Его колеса должны быть выполнены из упругих металлических колец, что позволит избавиться от рессор и повысит проходимость этого транспорта.
Первый лунный автомобиль, или, точнее, электромобиль с кабиной для одного космонавта, будет иметь электро-двигатели, рассчитанные на двухнедельный период работы. Кабина водителя будет содержать систему жизнеобеспечения, позволяющую удалять из кабины углекислый газ и поддерживать внутри нее должные влажность и температуру. Щиток над кабиной выполняет двоякую роль — предохраняет от перегрева и от метеоритных ударов.
Некоторые из лунных электромобилей используют для подробной топографической съемки лунной поверхности, во время которой экипаж будет поддерживать связь с Землей и передавать туда стереоскопические изображения лунных ландшафтов.
Усовершенствованным вариантом первых американских луноходов явится модель, рассчитанная на трех космонавтов. Ее радиус действия 1600 км, средняя скорость 10 км/ч. Электромобиль этого типа массой более 8 т сможет действовать автономно 42 земных дня.
Среди перспективных моделей лунного транспорта обращают на себя внимание самоходы с огромными надувными баллонами. Эти надувные элементы конструкции уменьшают давление аппарата на грунт и тем самым облегчают его перемещение по лунной поверхности. Основой аппарата служит цилиндрический корпус, который в то же время является полон осью надувных колес. В этой оси размещены герметически изолированные от вакуума отсеки для экипажа, аппаратуры, систем жизнеобеспечения и управления. Корпус аппарата стабилизирован, а колеса крутятся относительно него. На концах осп размещены два реактивных двигателя, обеспечивающие мягкую посадку этого вездехода на Луну. Затормаживая одно колесо относительно другого, можно маневрировать на лунной поверхности.
Еще оригинальнее самодвижущийся аппарат со сферическим «колесом». Эта сфера из сети металлических обручей соединена с кабиной с помощью карданных подвесов. Основной двигатель в этом лунном вездеходе, напоминающем земное «перекати-поле», ракетный (ЖРД). Он создает тягу, заставляющую вездеход катиться в нужном направлении. Другие реактивные двигатели управляют положением кабины и могут также использоваться для удержания вездехода на склоне какой-нибудь лунной горы. Есть в этом вездеходе и электрические двигатели, управляющие карданными подвесами. Высокая маневренность и проходимость, вероятно, сделают сферические вездеходы самым популярным видом лунного транспорта.
В условиях облегченного веса выглядят перспективными и прыгающие лунные аппараты. Стабилизация при прыжках обеспечивается специальной гироскопической системой. Прыгающие аппараты, очевидно, особенно хороши там, где препятствия (крупные скалы п т. п.) мешают перемещаться иному лунному транспорту.
Проектируются одноместные и двухместные прыгающие аппараты, оснащенные приборами для изучения лунного грунта в каждой точке прилунения. В одном варианте космонавт располагается внутри кабины, в другом—на открытом кресле (но, конечно, в скафандре). Прыжки таких аппаратов могут быть достаточно длинными (20—25 м), а средняя скорость перемещения около 10 км/ч. В проекте одной из моделей прыгающий: аппарат за 1380 прыжков преодолевает 37 км.
Намечено использовать в лунном мире также тяжелые лунные прыгающие лаборатории (ЛПЛ). Общая масса такой лаборатории 3,3 т. Она предназначается для работы двух космонавтов и различных приборов в течение 10 сут. Длина одного прыжка составит 170 м, а соответствующее время баллистического полета около 15 сек. За 10 сут ЛПЛ преодолеет около 500 км (разумеется, с кратковременными остановками в местах, представляющих особый интерес). Равный ей по массе колесный луноход за 14 сут проходит около 250 км. Значит, в лунных условиях прыгающий транспорт имеет немалые преимущества и, возможно, с его помощью удастся изучить особенно труднодоступные районы Луны.
Источник
Лунный автомобиль

Лунный автомобиль (лунный вездеход, англ. lunar rover , от англ. lunar roving vehicle , сокр. LRV ) — четырехколёсный транспортный планетоход для передвижения людей по поверхности Луны, использовавшийся в ходе последних экспедиций программы «Аполлон» — «Аполлон-15», «Аполлон-16» и «Аполлон-17» в начале 1970-х годов. Разработчик и генеральный подрядчик — Boeing.
Представлял собой двухместный электромобиль на двух неперезаряжаемых батареях. Управление электромобилем поручалось командиру экипажа.
Содержание
Преимущество
Вездеходы значительно расширили доступную для астронавтов площадь лунной поверхности. Ранее астронавты могли перемещаться на Луне лишь непосредственно вокруг места посадки из-за сковывавших их скафандров и других приборов жизнеобеспечения. Пользуясь же вездеходом, можно было развивать скорость до 13 км/ч. В ходе экспедиции «Аполлон-16» был установлен рекорд скорости передвижения по Луне — 18 км/ч. Общая длина пути, пройденного вездеходами в экспедициях Аполлон-15, Апполон−16 и Апполон−17, составила соответственно 28, 27 и 36 км [1] .
Конструкция


Лунный автомобиль был снабжён четырьмя двигателями постоянного тока (отдельный двигатель для каждого из колёс) производства Delco, каждый мощностью 0,25 л. с. (190 Вт) при оборотах до 10 000 об/мин, передача через понижающий волновой редуктор 80:1, а также — двумя рулевыми двигателями (по одному для передних и задних колёс). Источник электроэнергии — две неперезаряжаемые серебряно-цинковые батареи напряжением 36 вольт и ёмкостью 121 А·ч. каждая. Конструкцией предусматривалась возможность питания от батарей электромобиля устройства связи или телекамеры. Батареи и электроника были снабжены системой пассивного охлаждения.
Колёса были разработаны компанией General Motors. Конструкция колеса включала алюминиевый диск и покрышку диаметром 81 см и шириной 23 см. Покрышка была выполнена из плетёной стальной проволоки (волокон) толщиной 0,84 мм с цинковым покрытием. Порядка 50 % от площади покрышки занимал специальный титановый протектор для надёжного контакта с грунтом. Над колёсами располагались пылевые щитки.
Лунный автомобиль обладал массой в 210 кг и грузоподъёмностью в условиях лунной силы тяжести в 490 кг. Рама длиной в 3 м, с колёсной базой в 2,3 м была сварена из алюминиевых труб (алюминиевый сплав 2219). Рама состояла из трёх частей, скреплённых шарнирами, благодаря чему она складывалась и во время полёта к Луне была закреплена снаружи лунного модуля в сложенном виде. Машина опускалась на грунт двумя астронавтами с помощью блочно-тросовой системы. Максимальная высота автомобиля составляла 1,1 м. Клиренс с полной загрузкой — 35 см. Радиус разворота — около трёх метров [2] .
Управление машиной осуществлялось T-образной рукояткой, расположенной между сидениями. Подача ручки вперёд — движение вперёд; влево-вправо — поворот; назад-торможение, полностью назад — стояночный тормоз. На ручке имелся переключатель заднего хода. Приборное оборудование было смонтировано на отдельном щитке и включало в себя следующие указатели: скорость, пройденное расстояние, азимут движения (курс), наклон, индикаторы запаса мощности батарей и температуры.
Скорость передвижения составляла около 8—10 км/ч, хотя на отдельных участках мог разгоняться до 16 км/ч, и даже ставя рекорд в 18 км/ч, что впрочем, создавало лишь проблемы, так как, несмотря на полную нагруженность лунного вездехода, сила тяжести на Луне в 6 раз меньше земной, и лунный автомобиль ощутимо подбрасывало на неровностях грунта.
Навигация обеспечивалась гирокомпасом и одометром. Кроме того, на приборной панели было смонтировано простое устройство для определения азимута движения по тени штыря-гномона. Учитывая малую скорость движения Солнца на лунном небе, точность прибора была вполне удовлетворительной.
Лунный автомобиль был оборудован собственной системой радио- и телевизионной связи. Имелась остронаправленная сетчатая параболическая антенна для прямой связи с Землёй, также ненаправленная антенна. На борту были установлены цветная телевизионная камера и 16-мм кинокамера, а также 70-мм фотокамера. Для них имелся и запас плёнок в кассетах.
Использование
Каждый автомобиль использовался для трех поездок — по одной в каждый из трёх дней экспедиции.
| Экспедиция | Пробег | Общее время | Наибольшее удаление от лунного модуля |
|---|---|---|---|
| Аполлон-15 | 27,76 км | 3 ч 02 мин | 5,0 км |
| Аполлон-16 | 26,55 км | 3 ч 26 мин | 4,5 км |
| Аполлон-17 | 35,89 км | 4 ч 26 мин | 7,6 км |
Максимальное удаление вездехода от лунного модуля ограничивалось ресурсами индивидуальных систем обеспечения астронавтов, которых должно было хватить для пешего возвращения к модулю в случае поломки вездехода. После того как лунные автомобили и скафандры астронавтов продемонстрировали свою надежность, это ограничение было смягчено во время последней экспедиции (Аполлон-17), что позволило удалиться от лунного модуля на максимальное расстояние в 7,6 км.

В ходе эксплуатации LRV на Луне астронавты испытали ряд трудностей. Так, во время экспедиции Аполлон-16 при втором выходе на грунт (место — точка № 8) астронавт Янг случайно задел пылевой щиток транспортёра и оторвал его. Пыль, выброшенная из-под колеса, осыпала астронавтов, консоль управления и оборудование радиосвязи. Батареи стали нагреваться, и повысился расход мощности. Ремонт, однако, не производился. Та же деталь была оторвана в ходе экспедиции Аполлон-17 (Юджин Сернан задел её ручкой геологического молотка). Астронавты закрепили её клейкой лентой, однако из-за пыли лента держалась плохо, и через час щиток был окончательно потерян. Транспортёр снова осыпало пылью. Было принято решение исправить поломку собственными силами. Астронавты сделали пылевой щиток из подручных материалов, используя карты местности, клейкую ленту и зажимы — фиксаторы осветителей, снятые с лунного модуля. Карты со следами эрозии от лунной пыли были возвращены на Землю и экспонируются в музее National Air and Space Museum.
Установленная на вездеходе цветная телевизионная камера с 6-кратным объективом-трансфокатором была оснащена электроприводом для поворота в горизонтальной и вертикальной плоскостях и изменения фокусного расстояния, благодаря чему ей могли управлять не только астронавтами, но и оператор с Земли. Это значительно расширило возможности съемок, в частности позволило снять старт лунного модуля с Луны. Для такой съёмки вездеход заранее устанавливался на таком расстоянии от модуля, чтобы в поле зрения камеры попадал он весь. Оператор на Земле, ориентируясь на телевизионную картинку с камеры, управлял её приводом, сопровождая взлёт модуля. Хотя время старта было известно с точностью до секунд, в силу заметно долгого прохождения сигнала по цепочке Луна — Земля — Луна оператору приходилось работать с опережением. Так, вертикальное панорамирование приходилось начинать, когда на телекартинке оператора модуль ещё стоял на грунте. Это мешало съемке, в силу чего в экспедициях Аполлон-15 и Аполлон-16 старт лунных модулей был снят плохо. Однако в экспедиции Аполлон-17 старт лунного модуля был снят успешно [3] .
Интересные факты
- Во время второй лунной экспедиции «Аполлон-17» Юджин Сернан (по другим данным, Хариссон Шмитт, геолог экспедиции) неся в кармане скафандра молоток, случайно зацепил его рукояткой крыло «луноровера», в результате чего оно почти отвалилось; эта небольшая (по земным меркам), проблема превратилась в весьма значительную для астронавтов. Во время движения «луноровера» поднималось очень много пыли, а со сломанным крылом пыль попадала и на скафандры, и на элементы средства передвижения, а так как пыль практически черная, это создавало условия для перегрева (не зря скафандры выполнены в белых цветах). Инженеры НАСА всю ночь работали над решением проблемы, и утром сообщили астронавтам инструкции, в результате крыло было приклеено клейкой лентой. [4]
Фотогалерея

«Фалкон» (на заднем плане) и «Лунный Ровер» в процессе сборки в Космическом центре имени Кеннеди
Источник